
























08/12/2010
Ecole d’été 2011
MODULES DE COURBES ET THEORIE DE GROMOV-WITTEN 20 juin - 8 juillet 2011 Les deux premières semaines auront comme thème les modules des courbes (première semaine) et la théorie de Gromov-Witten (deuxième semaine). Les cours seront adaptés à un public large de mathématiciens plus ou moins expérimentés venant d’horizons très divers. Ces deux semaines auront une structure similaire : au cours des après-midi pendant toute la semaine il se déroulera un seul cours principal sur le thème de la semaine. Parallèlement, dans les séances du matin, nous avons programmé trois mini-cours par semaine introduisant des sujets de recherche majeurs. Le programme des après-midi laissera le temps aux discussions, aux exercices et aux séminaires organisés par les étudiants. Cours de l’après-midi : Carel FABER (tbc) et Dimitri ZVONKINE : Les espaces de modules des courbes stables. Mini-cours du matin : Cours de l’après-midi : Barabara FANTECHI : Théorie de Gromov-Witten Mini-cours du matin : Comité scientifique : Barbara FANTECHI (SISSA), Rahul PANDHARIPANDE (Princeton), Yongbin RUAN (University of Michigan). Lieu : Amphi Chabauty situé au rez-de-chaussée de l’Institut Fourier. Organisateurs : Samuel Boissière (Université de Nice), Alessandro Chiodo (Université de Grenoble), Laurent Manivel (Université de Grenoble). Cette école est financée par l’Institut Fourier, le CNRS, GRIFGA, et le projet ANR "Des nouvelles symétries pour la théorie de Gromov-Witten". Source : Ecole d’été 2011
Première semaine
![]() Gavril FARKAS
Gavril FARKAS ![]() Ravi VAKIL
Ravi VAKIL ![]() Rahul PANDHARIPANDE
Rahul PANDHARIPANDEDeuxième semaine
![]() Alessandro CHIODO et Yongbin RUAN
Alessandro CHIODO et Yongbin RUAN ![]() Tom COATES (tbc) et Alessio CORTI (tbc)
Tom COATES (tbc) et Alessio CORTI (tbc) ![]() Davesh MAULIK
Davesh MAULIKTroisième semaine
CONFERENCE SUR LA THÉORIE DE GROMOV-WITTEN
09:45 Publié dans Ecole d’été 2011 | Lien permanent | Commentaires (0) |  |
|  del.icio.us |
del.icio.us |  |
|  Digg |
Digg |  Facebook
Facebook
Théorie des nombres algébriques
Théorie des nombres algébriques
Prof. Eva Bayer Fluckiger
Christian Wuthrich
Master en Mathématiques
Semestre d'hiver 2005/6
- Voici une version préliminaire d'un polycopié pour le cours. Je tiens à remercier Sébastien Nobs pour avoir pris les notes. Elles ne sont pas encore entièrement corrigées. ps - pdf
- Rappels (Prerequis pour le cours) : ps - pdf
- Littérature (une liste de références pour le cours) : ps - pdf
- Exercices série 1 : ps - pdf; Corrigée ps - pdf
- Exercices série 2 : ps - pdf; Corrigée ps - pdf
- Exercices série 3 : ps - pdf; Corrigée ps - pdf
- Exercices série 4 : ps - pdf; Corrigée ps - pdf
- Exercices série 5 : ps - pdf; Corrigée ps - pdf
- Exercices série 6 : ps - pdf; Corrigée ps - pdf
- Exercices série 7 : ps - pdf; Corrigée ps - pdf
- Exercices série 8 : ps - pdf; Corrigée ps - pdf
- Exercices série 9 : ps - pdf; Corrigée ps - pdf
- Exercices série 10 : ps - pdf; Corrigée ps - pdf
- Exercices série 11 (modifiée): ps - pdf Corrigée ps - pdf
- Exercices série 12 : ps - pdf Corrigée ps - pdf
- Résumé des exercices ps - pdf
- La liste complète de tous les exercices et toutes les solution ps - pdf
-
Lien divers :
- La page de J. S. Milne contient les notes d'un cours sur la théorie des nombres algébriques.
- Le cours de William Stein se trouve ici.
- Le Number Theory Web et
- les directories de Google contiennent beaucoup de lien vers des pages intéressantes.
- Des biographies de mathématiciens.
09:44 Publié dans Théorie des nombres algébriques | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Décomposition de Dunford
En mathématiques, la décomposition de Dunford s'inscrit dans la problématique de la réduction d'endomorphisme. Cette approche consiste à décomposer l'espace vectoriel en une somme directe de sous-espaces stables où l'expression de l'endomorphisme est plus simple. Ce n'est pas une réduction dans le sens où elle n'est pas maximale. C'est-à-dire qu'il est parfois possible de pousser la décomposition en sous-espaces vectoriels stables plus petits. Elle suppose comme hypothèses que l'espace vectoriel est de dimension finie et que le polynôme minimal est scindé, c'est-à-dire qu'il s'exprime comme produit de polynômes du premier degré. C'est toujours le cas si le corps est algébriquement clos, comme par exemple celui des nombres complexes. Dans le cas ou la propriété n'est pas vérifiée, alors il est possible d'étendre le corps à sa clôture algébrique, et l'espace vectoriel à ce nouveau corps et dans ce contexte d'appliquer la décomposition de Dunford. Le corps des nombres réels se voit par exemple très généralement étendre pour permettre une application de cette décomposition. La décomposition de Dunford prouve que tout endomorphisme est la somme d'un endomorphisme diagonalisable et d'un endomorphisme nilpotent, les deux endomorphismes commutant et étant uniques. Cette décomposition est largement appliquée. Elle permet un calcul matriciel souvent rapide. C'est néanmoins souvent sous la forme de la réduction de Jordan qu'elle est utilisée.Décomposition de Dunford
Sommaire[masquer] |
Le théorème de diagonalisabilité permet de déterminer la structure de u quand il admet un polynôme annulateur scindé à racines simples. La décomposition de Dunford s'applique à un cas plus général. Théorème de la décomposition de Dunford — Soit u un endomorphisme d'un espace vectoriel E. Si u admet un polynôme minimal scindé, alors il peut s'écrire sous la forme u=d+n avec d un endomorphisme diagonalisable et n un endomorphisme nilpotent tels que d et n commutent (c'est-à-dire dn=nd). De plus d et n sont des polynômes en u et sont uniques. L'idée initiale de cette approche est donnée par la proposition suivante, démontrée dans l'article sur les polynômes d'endomorphismes dans le paragraphe sur les polynômes minimaux : Or, si le polynôme minimal est scindé, il peut s'écrire sous la forme: Si l'on note Ces considérations permettent de démontrer la décomposition de Dunford. Elle permettent de plus de démontrer les propriétés suivantes : Un résultat notoire de l'approche par les polynômes d'endomorphismes réside dans le fait que la connaissance du polynôme minimal permet de définir une algorithmique fournissant à la fois les projecteurs sur les espaces caractéristiques mais aussi la composante diagonale et nilpotente de l'endomorphisme. En dimension finie le théorème de Cayley-Hamilton assure que χu(u) = 0 où χu désigne le polynôme caractéristique de u. Si χu est scindé alors u est décomposable. C'est en particulier le cas pour tout endomorphisme d'un espace de dimension finie sur un corps algébriquement clos ( La décomposition de Dunford, combinée avec la décomposition de Frobenius permet d'obtenir la réduction de Jordan en dimension finie. En effet, d et n commutent donc les sous-espaces propres de d sont stables par n. La restriction de n au sous-espace propre admet une matrice formée de blocs de Jordan nilpotents ce qui donne, en ajoutant λIp, des blocs de Jordan pour d+n dans une base adaptée. Ainsi on obtient une matrice diagonale par blocs formée de blocs de Jordan en utilisant l'union de ces bases.Théorème [modifier]
Démonstration [modifier]
Via les sous-espaces caractéristiques [modifier]
 une décomposition en facteurs de degré supérieur ou égal à 1 et premiers deux à deux du polynôme minimal
une décomposition en facteurs de degré supérieur ou égal à 1 et premiers deux à deux du polynôme minimal  d'un endomorphisme u. Alors la suite des noyaux
d'un endomorphisme u. Alors la suite des noyaux  est une décomposition de l'espace E en somme directe de sous-espaces stables par l'endomorphisme.
est une décomposition de l'espace E en somme directe de sous-espaces stables par l'endomorphisme.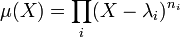
 le noyau de l'endomorphisme
le noyau de l'endomorphisme  , alors le paragraphe précédent nous indique que la suite
, alors le paragraphe précédent nous indique que la suite  forme une somme directe de l'espace E de sous-espaces non réduits à 0 et stables par l'endomorphisme. On appelle ces sous-espaces les sous-espaces caractéristiques. Nous avons alors les trois propriétés suivantes:
forme une somme directe de l'espace E de sous-espaces non réduits à 0 et stables par l'endomorphisme. On appelle ces sous-espaces les sous-espaces caractéristiques. Nous avons alors les trois propriétés suivantes:
est la somme d'une homothétie de rapport  et d'un endomorphisme nilpotent d'ordre
et d'un endomorphisme nilpotent d'ordre  .
. est la suite des valeurs propres (i.e. le spectre de u). Les sous-espaces propres associés sont inclus dans les sous-espaces caractéristiques.
est la suite des valeurs propres (i.e. le spectre de u). Les sous-espaces propres associés sont inclus dans les sous-espaces caractéristiques.
Via les projecteurs [modifier]
Cas d'applications [modifier]
 notamment).
notamment).Réduction de Jordan [modifier]

09:42 Publié dans Décomposition de Dunford | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Décomposition de Frobenius
On considère un K-espace vectoriel E de dimension finie et un endomorphisme u de cet espace. La décomposition de Frobenius est la décomposition de l'espace E en somme directe de sous-espaces cycliques. Cette décomposition fait apparaitre les facteurs invariants de l'endomorphisme u. Combinée avec la décomposition de Dunford (dans un ordre ou dans l'autre), on obtient la réduction de Jordan. Contrairement à ces dernières, la décomposition de Frobenius peut s'effectuer sur un corps quelconque, on ne suppose pas ici que K est algébriquement clos.Décomposition de Frobenius
Sommaire[masquer] |
Soit x un vecteur de E, l'ensemble Soit x un vecteur de E, l'ensemble Soit La dimension de Sx est égale au degré du polynôme πu,x. Pour tout vecteur x de E, le polynôme conducteur πu,x divise le polynôme minimal πu de u. On dira que x est u-maximum lorsque πu,x = πu. La décomposition de Frobenius est basée sur les deux résultats non triviaux suivants : En procédant par récurrence, on parvient alors à la : Il existe une suite de vecteurs Les polynômes Deux endomorphismes sont semblables ssi ils ont les mêmes facteurs invariants. Les endomorphismes induits par u ont des propriétés spécifiques, ce sont des endomorphismes cycliques dont il ne reste plus qu'à étudier les propriétés spécifiques. On dit que u est un endomorphisme cyclique ssi il existe un élément x de E tel que Sx = E. On peut caractériser les endomorphismes cycliques de plusieurs manières : un endomorphisme u de E est cyclique si et seulement siPolynôme conducteur [modifier]
![I_x={Pin K[X]mid P(u)(x)=0}](http://upload.wikimedia.org/math/a/8/d/a8d881ed5da882b9531e475451512abb.png) est un idéal non nul de K[X], il est donc engendré par un unique polynôme normalisé πu,x appelépolynôme conducteur de u en x, ou parfois polynôme minimal local de u en x.
est un idéal non nul de K[X], il est donc engendré par un unique polynôme normalisé πu,x appelépolynôme conducteur de u en x, ou parfois polynôme minimal local de u en x.Sous-espace cyclique [modifier]
![S_x={P(u)(x)mid Pin K[X]}](http://upload.wikimedia.org/math/9/b/0/9b0380de53edf0c2394f073ec285e463.png) est un sous-espace vectoriel de E stable par u appelé sous-espace u-cyclique engendré par x, ou encore clôture u-stable de x.
est un sous-espace vectoriel de E stable par u appelé sous-espace u-cyclique engendré par x, ou encore clôture u-stable de x.![Pin K[X]](http://upload.wikimedia.org/math/4/f/a/4facb36da11821b818abd66b424a6a76.png) , on a
, on a  si et seulement si
si et seulement si  . Ainsi le polynôme conducteur πu,x est le polynôme minimal de l'endomorphisme induit par u sur le sous-espace Sx.
. Ainsi le polynôme conducteur πu,x est le polynôme minimal de l'endomorphisme induit par u sur le sous-espace Sx.Vecteurs u-maximums [modifier]
Décomposition de Frobenius [modifier]
 de E telle que
de E telle que


 ne dépendent pas du choix des vecteurs xi, ce sont les facteurs invariants de u. Le polynôme minimal
ne dépendent pas du choix des vecteurs xi, ce sont les facteurs invariants de u. Le polynôme minimal  et le polynôme caractéristique
et le polynôme caractéristique  .
.Endomorphisme cyclique [modifier]
Applications [modifier]
Références [modifier]
Voir aussi [modifier]
09:34 Publié dans Décomposition de Frobenius | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Module sur un anneau
En mathématiques, au sein des structures algébriques, « un module est à un anneau ce qu'un espace vectoriel est à un corps »1 : pour un espace vectoriel, l'ensemble des scalairesforme un corps tandis que pour un module, cet ensemble est seulement muni d'une structure d'anneau (unitaire, mais non nécessairement commutatif). Une partie des travaux en théorie des modules consiste à retrouver les résultats spectaculaires de la théorie des espaces vectoriels, quitte pour cela à travailler avec des anneaux plus maniables, comme les anneaux principaux. Par ailleurs, la notion de module sur un anneau généralise celle d'idéal.Module sur un anneau
Sommaire[masquer] |
Certaines propriétés vraies pour les espaces vectoriels ne sont plus vraies pour les modules. Par exemple l'existence d'une base n'y est plus assurée, et on ne peut pas nécessairement y développer de théorie de la dimension, même dans un module engendré par un nombre fini d'éléments. Les modules ne sont pas une généralisation inutile. Ils apparaissent naturellement dans beaucoup de situations algébriques ou géométriques. Un exemple simple est un module sur l'anneau des fonctions infiniment différentiables sur un ouvert : il est naturel de ne pas pouvoir y faire de division, puisqu'il vaut mieux éviter de diviser par 0. De la même façon, il est naturel de considérer un module sur l'anneau des polynômes à une ou plusieurs variables. Si A est un anneau (unitaire), et (M , +) un groupe commutatif. Si de plus, M est muni d'une loi externe alors (M, + , Ce qui a été défini ici est un A-module à gauche, car, dans la loi externe, les éléments de A sont placés à gauche. On pourra définir de même un A-module à droite. Il est important de remarquer que les structures de module à gauche et à droite ne diffèrent pas uniquement par leur écriture : si les deux premiers axiomes sont les mêmes, le troisième s'écrit Par contre, le petit raisonnement ci-dessus montre que, si l'on "inverse" la loi de A, un module à droite peut être vu comme un module à gauche. Plus précisément, notons Aop l'anneau "opposé" à A, c'est-à-dire le groupe abélien A muni de la multiplication définie par aopbop = ba, si aop et bop désignent a et b vus comme éléments de Aop. Alors, si M est un A-module à gauche, M peut être vu comme un Aop-module à droite, où l'action de Aop est définie par a.m = m.aop. Ceci justifie que dans la suite, on puisse se restreindre à l'étude des modules à gauche. Cette loi est la seule qui munisse un groupe abélien d'une structure de Le premier axiome montre que, pour Réciproquement, la donnée d'un morphisme d'anneau unitaire Un tel morphisme A Ceci est une généralisation de ce que l'on trouve en représentation des groupes, où l'on définit une représentation d'un groupe G vers un espace vectoriel sur un corps K comme un morphisme de l'algèbre du groupe K[G] vers End(V), autrement dit, où l'on donne une structure de K[G]-module à V. Soit E un A-module à gauche, et M une partie de E. On dit que M est un sous-module (à gauche) si les conditions suivantes sont respectées : Autrement dit, un sous-module est une partie linéairement stable. Exemples Une application linéaire f entre deux modules M et N sur un même anneau A est une fonction qui conserve la structure de module, i.e qui vérifie : Autrement dit, une application linéaire est un morphisme de modules. Si f est bijective, on dit de plus que f est un isomorphisme. Si les modules de départ et d'arrivée M et N sont identiques, on dit que f est un endomorphisme. Si f est à la fois un endomorphisme et un isomorphisme, on dit que c'est un automorphisme. Le noyau d'une application linéaire f est l'ensemble des éléments x de M qui vérifient f(x) = 0. C'est un sous-module de M et il est noté Ker f. On peut également définir l'image d'une application linéaire Im f = f(M) qui est un sous-module de N. Comme dans le cas des groupes ou des anneaux, un morphisme de A-modules Si on considère une famille de module ( Le module ainsi défini s'appelle le module produit. Les projections Soit C'est un sous-module de Si M est un module, et Dans ce cas, la somme On dit qu'un A-module est de type fini s'il est engendré sur A par un nombre fini d'éléments. On a alors On dit qu'un module est de présentation finie s'il est le quotient d'un An par un sous-module de type fini. Un module de présentation finie est en particulier de type fini. La réciproque est vraie lorsque A est noethérien. Pour un module M de présentation finie, tout homomorphisme surjectif On dit qu'un A-module est libre s'il possède une base sur A (voir Module libre). Si M est de type fini et libre, il existe alors un isomorphisme entre M et An, où n est le cardinal de la base. Les modules sont un outil indispensable pour passer de propriétés géométriques à des propriétés fonctionnelles, ou ressemblant à des propriétés fonctionnelles. Ainsi, au lieu de voir unevariété différentiable comme une partie d'un espace concret ou abstrait, on va plutôt considérer une classe de fonctions sur cette variété et déclarer que cette classe est la classe des fonctions différentiables sur la variété -- il faudra satisfaire des conditions appropriées de compatibilité. On pourra ainsi traduire les propriétés géométriques de la variété par des propriétés algébriques de la classe de fonctions que nous avons déclarées comme fonctions différentiables. Mieux que des fonctions, on peut considérer des champs sur une variété différentiable. Le cas le plus simple est celui des champs tangents différentiables à une variété. Pensons par exemple aux champs de vecteurs tangents à la sphère unité dans un espace de dimension 3. Il s'agit bien d'un module sur l'anneau des fonctions différentiables sur la sphère : si on multiplie un champ différentiable tangent à la sphère par une fonction différentiable, on trouve bien un champ différentiable. Ce module est engendré par la restriction à la sphère des projections tangentes des champs constants égaux aux vecteurs de base de l'espace - cela nous fait trois champs. Mais on peut montrer que ces trois champs ne sont pas indépendants, et on peut même montrer qu'il n'existe aucun choix de deux champs tangents qui pourraient engendrer le module des champs tangents à la sphère et différentiables. On a là l'exemple le plus simple d'un module de type fini, c'est-à-dire engendré par un nombre fini de ses éléments, mais qui ne possède pas de base. La correspondance systématique entre objet géométrique et objet de nature fonctionnelle est dominante en géométrie algébrique. En effet, si V est l'ensemble des solutions communes d'un système d'équations polynomiales en n variables, on peut étudier l'ensemble des polynômes qui s'annulent sur V; ce sera un idéal de l'anneau des polynômes à n variables, et donc en particulier, un module sur cet anneau. Il est possible de retrouver nombre de propriétés géométrique de V en étudiant les propriétés de cet idéal: points singuliers, dimension, recherche de droites incluses dans V, et ainsi de suite. Cette faculté d'exprimer les propriétés d'objets géométriques au moyen d'espaces de fonctions sur ces objets est à la base de la géométrie non commutative: les espaces de fonctions sur des objets géométriques usuels sont des anneaux commutatifs pour la multiplication (et même souvent des algèbres, c'est-à-dire des anneaux munis également d'une structure compatible d'espace vectoriel). La démarche de la géométrie non commutative consiste à explorer ce que seraient des objets géométriques sur lesquels vivraient des "fonctions" formant un anneau ou une algèbre non commutative, et c'est pour cette raison que le cas des anneaux non commutatifs et des modules sur des anneaux non commutatifs est très important actuellement.Comparaison avec la structure d'espace vectoriel [modifier]
Définitions [modifier]
Module à gauche, module à droite [modifier]
 de A × M dans M vérifiant, pour tous éléments a et b de A et x, y de M :
de A × M dans M vérifiant, pour tous éléments a et b de A et x, y de M :
 (distributivité de par rapport à l'addition dans M)
(distributivité de par rapport à l'addition dans M) (distributivité de par rapport à l'addition dans A)
(distributivité de par rapport à l'addition dans A)

 ) est un A-module à gauche.
) est un A-module à gauche. . Si l'on transcrivait naïvement cette égalité en écrivant les éléments de A gauche, on obtiendrait
. Si l'on transcrivait naïvement cette égalité en écrivant les éléments de A gauche, on obtiendrait  , ce qui, si A n'est pas commutatif, ne revient pas au même que l'axiome qui donne la structure de module à gauche.
, ce qui, si A n'est pas commutatif, ne revient pas au même que l'axiome qui donne la structure de module à gauche.Exemples [modifier]
 -module.-module pour la loi externe définie par :
-module.-module pour la loi externe définie par : avec n termes x
avec n termes x
 l'opposé de
l'opposé de  -module. Il y a donc équivalence entre la notion de -module et celle de groupe abélien.
-module. Il y a donc équivalence entre la notion de -module et celle de groupe abélien.
 qui confère à M une structure de End(M)-module .
qui confère à M une structure de End(M)-module . à n dimensions est un module à gauche sur
à n dimensions est un module à gauche sur  via la multiplication matricielle.
via la multiplication matricielle.
 sur un corps
sur un corps  peut être considéré comme un module sur l'anneau principal
peut être considéré comme un module sur l'anneau principal ![mathbb K[X]](http://upload.wikimedia.org/math/1/1/c/11cf18672fa8c102e5d2ec8bdfe203c8.png) , et par ce biais la majeure partie des propriétés de l'algèbre linéaire peut être démontrée2.
, et par ce biais la majeure partie des propriétés de l'algèbre linéaire peut être démontrée2.
Cette structure de module est la suivante : étant donné  fixé, pour tout
fixé, pour tout ![left( p, x right) in mathbb K[X]times E](http://upload.wikimedia.org/math/4/f/e/4fe3999552e4b77d3dcb48d887246383.png) , on pose
, on pose  , avec
, avec  car cet ensemble a une structure d'algèbre sur .
car cet ensemble a une structure d'algèbre sur .Lien avec la théorie des représentations [modifier]
 , l'application
, l'application  est un endomorphisme du groupe M. Les trois axiomes suivants traduisent quant à eux le fait que l'application
est un endomorphisme du groupe M. Les trois axiomes suivants traduisent quant à eux le fait que l'application  est un morphisme (unitaire) de l'anneau A dans l'anneau des endomorphismes de M, noté End(M).
est un morphisme (unitaire) de l'anneau A dans l'anneau des endomorphismes de M, noté End(M). fournit à M une structure de A-module (à gauche) via la loi
fournit à M une structure de A-module (à gauche) via la loi  . Une structure de A-module est donc équivalente à la donnée d'un morphisme
. Une structure de A-module est donc équivalente à la donnée d'un morphisme  .
. End(M) est appelé une représentation de A sur le groupe abélien M. Une représentation est dite fidèle si elle est injective. En termes de module, cela signifie que si pour tout
End(M) est appelé une représentation de A sur le groupe abélien M. Une représentation est dite fidèle si elle est injective. En termes de module, cela signifie que si pour tout  , alors a = 0.
, alors a = 0.Sous-module [modifier]

, tout sous-groupe est aussi un sous-module.Applications linéaires [modifier]

 donne lieu à un isomorphisme
donne lieu à un isomorphisme  , défini par
, défini par 
Opérations sur les modules [modifier]
Produits de modules [modifier]
 sur un même anneau A, on peut munir l'ensemble produit
sur un même anneau A, on peut munir l'ensemble produit  d'une structure de module en définissant les lois suivantes :
d'une structure de module en définissant les lois suivantes :


 sont alors des applications linéaires surjectives. Un exemple important de produit de modules est celui où tous les modules facteurs sont identiques à un même module M ; leur produit MI n'est alors autre que l'ensemble des applications de I dans M.
sont alors des applications linéaires surjectives. Un exemple important de produit de modules est celui où tous les modules facteurs sont identiques à un même module M ; leur produit MI n'est alors autre que l'ensemble des applications de I dans M.Somme directe de modules [modifier]
 une famille de A-modules, on note leur produit
une famille de A-modules, on note leur produit  . L'ensemble E des éléments de M dont toutes les composantes sauf un nombre fini sont nulles est appelé somme directe externe de la famille de modules et il est noté :
. L'ensemble E des éléments de M dont toutes les composantes sauf un nombre fini sont nulles est appelé somme directe externe de la famille de modules et il est noté : . Dans le cas où I est fini, la somme directe E et le produit M sont évidemment confondus.
. Dans le cas où I est fini, la somme directe E et le produit M sont évidemment confondus.Intersection et somme de sous-modules [modifier]
est une collection de sous-modules de M, on dit que la famille est en somme directe si :
 , appelée somme directe interne, est isomorphe à la somme directe externe et elle est également notée
, appelée somme directe interne, est isomorphe à la somme directe externe et elle est également notée  .
.Propriétés de finitude [modifier]
 .
. avec L de type fini admet un noyau de type fini3.
avec L de type fini admet un noyau de type fini3.Applications des modules [modifier]
Notes et références [modifier]
Voir aussi [modifier]
09:32 Publié dans Module sur un anneau | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Propriétés métriques des droites et plans
En géométrie euclidienne, c'est-à-dire dans le plan et l'espace muni d'une distance et d'un produit scalaire, les droites et les plans possèdent des propriétés métriques permettant de les caractériser grâce à un point et un vecteur, dit normal. On peut aussi calculer la distance qui les sépare d'un point donné ou bien calculer celle qui sépare deux droites ou deux plans. On peut aussi calculer l'angle formé par deux droites ou deux plans. Dans cet article, on a muni le plan ou l'espace d'un repère orthonormal dans lequel sont exprimées toutes les coordonnées. Toute droite du plan y possède une équation du type ux + vy + h = 0 où (u , v) est différent de (0 , 0) et tout plan de l'espace possède une équation de la forme ux + vy + wz + h = 0 où (u, v, w) est différent de (0, 0, 0).Propriétés métriques des droites et plans
Sommaire[masquer]
|
Soit M(x,y) un point de la droite D dont une équation dans un repère orthonormal est donnée par : et M0(x0,y0) un point spécifique de D, On a : En retranchant (2) à (1) on obtient : En notant La droite d'équation ux + vy + h = 0 est donc orthogonale au vecteur Soit un point M(x,y) et un vecteur La droite D, passant par M0(x0,y0) et orthogonale à Soit H la projecté de M(x,y) sur D avec La droite perpendiculaire à D et passant par M étant orientée suivant la direction du vecteur En valeur absolue : Pour v non nul, la droite D d'équation ux + vy + h = 0 possède une équation sous la forme mx + b = y avec et La pente d'une droite est le réel L'angle α représente l'angle entre l'axe des abscisses et la droite D. Dans le repère L'équation (1) s'écrit : Soit D et D' deux droites d'équations L'angle formé par les deux droites est connu par sa tangente : le plan Soit On calculera La distance MH est donnée par Le plan étant défini par l'équation ux + vy + wz + h = 0, les droites perpendiculaires au plan sont toutes les droites ayant comme vecteur directeur dans le cas où aucun des réels, u, v, w, n'est nul. Si un seul des des réels est nul , par exemple u= 0, le système devient : Si deux réels sont nuls, par exemple u=v=0, le système devient : Soient la droite (D0) passant par M0(x0,y0,z0) et de direction le vecteur Si les vecteurs L'aire de la base du solide est donnée par La distance entre les deux droites est alors égale à Si les vecteurs sont colinéaires alors les deux droites sont parallèles et la distance qui les sépare correspond à la distance qui sépare le point M1 de la droite D0. Soit M(x,y,z) un point du plan P dont l'équation dans un repère orthonormé est donnée par : Pour M0(x0,y0,z0) un point spécifique de P on obtient : En retranchant (2bis) à (1bis) on obtient : En notant Le plan P d'équation ux + vy + wz + h = 0 est donc orthogonal au vecteur Soit un point Le plan P, passant par M0(x0,y0,z0) et orthogonal à Soit H la projeté de M(x,y,z) sur P avec La droite perpendiculaire à P et passant par M étant orientée suivant la direction du vecteur En valeur absolue : Soitent (P) et (P') deux plans d'équations L'angle géométrique (P,P') est déterminé à l'aide de l'angle des vecteurs normaux L'angle de plus grande pente est l'angle le plus grand formé entre un plan et le plan horizontal. De façon imagée on peut définir l'angle de plus grande pente comme l'angle formé entre la trajectoire d'une bille cirulant librement sur un plan et le plan horizontal. Etant donné l'équation d'un plan horizontal : L'angle de plus grande pente est donné par : Les plan (P) et (P') sont perpendiculaires si les vecteurs normaux Soient un point M0(x0,y0,z0) et deux vecteurs Ce qui donne, en représentant le produit mixte de ces trois vecteurs sous la forme d'un déterminant : Son équation est : que l'on peut écrire sous la forme ux + vy + wz + h = 0 Soient deux points M1(x1,y1,z1),M2(x2,y2,z2) et un vecteur Le point M appartient au plan passant par M1(x1,y1,z1),M2(x2,y2,z2) et de direction Son équation est : Soient M1(x1,y1,z1),M2(x2,y2,z2),M3(x3,y3,z3), trois points non alignés. Par analogie avec ce qui précède, l'équation du plan passant par ces trois points est :La droite dans le plan euclidien [modifier]
Vecteur normal à une droite [modifier]



 , le vecteur de coordonnées (u, v), on exprime (1) comme suit :
, le vecteur de coordonnées (u, v), on exprime (1) comme suit : . Le vecteur est appelé un vecteur normal à la droite D.
. Le vecteur est appelé un vecteur normal à la droite D.Droite passant par un point et orthogonale à un vecteur non nul donné [modifier]
 non nul. Le point M appartient à la droite D, passant par M0(x0,y0) et orthogonale à
non nul. Le point M appartient à la droite D, passant par M0(x0,y0) et orthogonale à  , si et seulement si :
, si et seulement si : , a donc pour équation :
, a donc pour équation :Distance algébrique d'un point M(x,y) à une droite d'équation ux + vy + h = 0 [modifier]
 orthogonal à D., on montre que la distance algébrique entre M et D est donnée par :
orthogonal à D., on montre que la distance algébrique entre M et D est donnée par :
Droite et pente [modifier]



Équation normale d'une droite [modifier]
 ,notons
,notons  un vecteur unitaire normal à la droite D, orienté de O vers D, la valeur
un vecteur unitaire normal à la droite D, orienté de O vers D, la valeur  représente alors l'angle
représente alors l'angle . On note d'autre part p la distance entre l'origine O du repère et la droite D.
. On note d'autre part p la distance entre l'origine O du repère et la droite D.
Angles de deux droites [modifier]



La droite dans l'espace euclidien [modifier]
Distance d'un point M à une droite quelconque D de l'espace [modifier]
Cas où la droite est définie par l'intersection de deux plans [modifier]


 perpendiculaire à
perpendiculaire à  appartient au faisceau de plans
appartient au faisceau de plans  sera perpendiculaire à pour
sera perpendiculaire à pour 
 les projections orthogonales du point
les projections orthogonales du point  respectivement sur
respectivement sur  , on en déduit
, on en déduit 
 et
et  comme détaillé au chapitre "Distance algébrique d'un point à un plan" ci dessous.
comme détaillé au chapitre "Distance algébrique d'un point à un plan" ci dessous.Cas où la droite est définie par un point M0 et un vecteur
 non nul [modifier]
non nul [modifier]
Droites orthogonales à un plan [modifier]
 . Une droite D passant par le point M0(x0,y0,z0) et perpendiculaire à [P]:ux + vy + wz + h = 0 a pour équations :
. Une droite D passant par le point M0(x0,y0,z0) et perpendiculaire à [P]:ux + vy + wz + h = 0 a pour équations :


Distance entre deux droites quelconque de l'espace [modifier]
 et (D1) la droite passant par M1(x1,y1,z1) et de direction
et (D1) la droite passant par M1(x1,y1,z1) et de direction 
 et
et  sont indépendants, le volume du solide construit sur
sont indépendants, le volume du solide construit sur  est égal à | k | . Ce réel se calcule grâce au produit mixte :
est égal à | k | . Ce réel se calcule grâce au produit mixte :
 tel que
tel que 

Le plan dans l'espace euclidien [modifier]
Vecteur orthogonal à un plan [modifier]



 , le vecteur de coordonnées (u,, v , w), on exprime (1bis) comme suit :
et ce vecteur est appelé un vecteur normal au plan P.
, le vecteur de coordonnées (u,, v , w), on exprime (1bis) comme suit :
et ce vecteur est appelé un vecteur normal au plan P.Plan passant par un point et orthogonal à un vecteur non nul donné [modifier]
 et un vecteur
et un vecteur  non nul. Le point M appartient au plan P, passant par
non nul. Le point M appartient au plan P, passant par  et orthogonal à , si et seulement si :, a donc pour équation : :
et orthogonal à , si et seulement si :, a donc pour équation : :Distance algébrique d'un point M(x,y,z) à un plan P d'équation ux + vy + wz + h = 0 [modifier]
orthogonal à P. , on montre que la distance algébrique entre M et P est donnée par :
, on montre que la distance algébrique entre M et P est donnée par :

Angles de deux plans [modifier]




Cas particulier : Angle de plus grande pente [modifier]


Plans perpendiculaires [modifier]
et  sont orthogonaux. Ce qui implique
sont orthogonaux. Ce qui implique
Équation de plan et déterminant [modifier]
Plan défini par un point et deux vecteurs non colinéaires [modifier]
et  non colinéaires. Un point M (x, y, z) appartient au plan P passant par M0(x0,y0,z0) et de directions et si et seulement si il existe deux réels λ et μ tels que
non colinéaires. Un point M (x, y, z) appartient au plan P passant par M0(x0,y0,z0) et de directions et si et seulement si il existe deux réels λ et μ tels que  . Cette égalité exprime que
. Cette égalité exprime que  sont coplanaires.
sont coplanaires.

Plan défini par deux points et un vecteur [modifier]
 non colinéaire à
non colinéaire à  . si et seulement si les trois vecteurs :
. si et seulement si les trois vecteurs : sont coplanaires, donc :
sont coplanaires, donc :

Plan défini par trois points non alignés [modifier]

Annexes [modifier]
Liens internes [modifier]
08:37 Publié dans Propriétés métriques des droites et plans | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Droite (mathématiques)
Droite (mathématiques)
![]() Pour les articles homonymes, voir Droite.
Pour les articles homonymes, voir Droite.
|
|
Cet article ou cette section concernant les mathématiques doit être recyclé.
Une réorganisation et une clarification du contenu est nécessaire. Discutez des points à améliorer en page de discussion.
|
Pour les Anciens, la droite, en mathématiques et surtout en géométrie, était un objet allant de soi, si évident que l'on négligeait de préciser de quoi l'on parlait. L'un des premiers à formaliser la notion de droite fut le Grec Euclide dans ses Éléments. Avec le développement du calcul algébrique et du calcul vectoriel, d'autres définitions vinrent s'ajouter. Mais c'est la naissance des géométries non euclidiennes qui a conduit à la découverte de nouveaux types de droites, et, par là-même, nous a forcés à éclaircir et approfondir ce concept.
Sommaire[masquer] |
« La ligne droite est le plus court chemin pour aller d'un point à un autre »1. Cette définition simple suffit à certaines applications concrètes. Elle permet par exemple au jardinier de tracer ses lignes de semis : en tendant une corde entre deux piquets, il matérialise une ligne tirée au cordeau. Une autre image habituelle est celle du fil à plomb1. C'est-à-dire, dans les deux cas, un fil tendu dont on néglige l'épaisseur. Cette définition est celle d'un segment. Une droite, à la différence d'un segment, est illimitée des deux côtés. Différentes limitations de cette définition ont conduit les mathématiciens à lui en préférer d'autres. Par exemple, si on assimilie la Terre à une sphère, le chemin le plus court entre deux points n'est plus une ligne droite, mais un arc de cercle. Cependant, à l'échelle d'un être humain, ce cercle est si grand qu'une ligne droite en est une bonne approximation2. La notion de « chemin le plus court » est étudiée sous le nom de géodésique. Dans ses éléments, Euclide définit les objets relevant de la géométrie (point, droite, plan, angle) et leur affecte un certain nombre de propriétés (postulats). À l'aide de ces éléments de base, il essaie de construire, par des démonstrations rigoureuses, l'ensemble des autres propriétés. Pour Euclide : Il part d'une droite finie qu'il définit comme un segment. Il a besoin d'un postulat pour la prolonger au-delà de ses extrémités, d'un autre pour en prouver l'existence (Par deux points distincts passe une droite) et d'un autre appelé le cinquième postulat d'Euclide pour traiter des positions relatives des droites ( Si une droite coupe deux autres droites, de telle façon que la somme des angles intérieurs du même côté soit plus petite que deux droits, ces droites, prolongées à l'infini, se rencontreront du côté où les angles sont plus petits que deux droits.) dont plusieurs versions équivalentes peuvent être données. L'approche d'Euclide est féconde, elle permet de démontrer de nombreux théorèmes considérés comme élémentaires au regard des mathématiques au sens moderne du terme. On peut citer le théorème de Thalès, le théorème de Pythagore ou encore le problème de Napoléon. La définition axiomatique d'Euclide apparait trop pauvre pour résoudre plusieurs familles de problèmes. On peut citer historiquement ceux associés à la construction à la règle et au compas, par exemple la trisection de l'angle, la duplication du cube ou encore la construction d'un polygone régulier. Une approche algébrique est utilisée pour pallier cette faiblesse. À l'aide de la notion de polynôme cyclotomique, Gauss réalise une percée majeure dans ce domaine en 1801 qu'il publie dans son livre Disquisitiones arithmeticae. Les progrès de la physique engendrent une nouvelle branche des mathématiques, initialement appelée calcul infinitésimal et maintenant calcul différentiel. Elle obtient comme premier succès la compréhension de la mécanique céleste. Une fois encore, la modélisation d'Euclide est insuffisante pour formaliser convenablement ce domaine. Une nouvelle construction est alors proposée, elle se fonde sur des structures algébriques. Les groupes abéliens et les corps sont utilisées pour définir un espace vectoriel puis unespace affine. En géométrie vectorielle, une droite est un sous-espace vectoriel de dimension 1. On peut la nommer également droite vectorielle. Si v est un vecteur non nul, la droite vectorielle engendrée par v est l'ensemble des vecteurs w pour lesquels il existe un scalaire (un réel pour un espace vectoriel sur R) k tel que w = kv. On dit alors que les vecteurs v et w sont colinéaires. En géométrie affine, une droite est un sous-espace affine de dimension 1. Si A est un point et v un vecteur non nul, la droite affine engendrée par A et v est l'ensemble des points M pour lesquels il existe un scalaire k tel que On peut aussi définir la droite passant par les points distincts A et B comme l'ensemble des barycentres des points A et B. La notion de droite est alors largement généralisée. L'espace vectoriel peut être un ensemble fini comme pour les codes linéaires utilisés dans la théorie de l'information, ou enarithmétique. Une droite est alors elle aussi un ensemble fini de points. L'espace vectoriel peut être une extension de corps comme dans le cadre de la théorie de Galois, l'ensemble desnombres rationnels dans le corps des réels possède les propriétés géométrique d'une droite. En analyse, et particulièrement en analyse fonctionnelle une droite est un ensemble de fonctions. Par exemple les primitives d'une fonction continue réelle de la variable réelle forment une droite. L'approche algébrique permet d'enrichir très largement la géométrie et offre des réponses satisfaisantes à bon nombre de problèmes. En revanche une vielle conjecture reste ouverte : comment démontrer le cinquième postulat d'Euclide. Proclos l'exprime de la manière suivante: Dans un plan, par un point distinct d'une droite d, il existe une unique droite parallèle à d. Déjà, les grecs savaient qu'une sphère semble pouvoir définir une géométrie, les droites seraient alors les grands cercles de la sphère. En revanche, la connexion entre une sphère et la définition d'une géométrie reste à cette époque hors de portée. David Hilbert apporte un élément de réponse. La construction d'Euclide n'est pas entièrement rigoureuse. Il manque en effet, quinze axiomes pour bâtir les fondements d'un système logique à même de supporter la géométrie euclidienne. Une telle formalisation existe, on parle par exemple d'axiomes de Hilbert. La réponse à la question que pose le cinquième postulat est donc de l'ordre de la logique. La base axiomatique d'Euclide constituée des quatre premiers postulats est trop faible pour garantir le cinquième. Si l'approche de Hilbert permet de résoudre cette question, elle est peu opérationnelle pour bâtir la théorie de la géométrie euclidienne. On utilise en général la base axiomatique dePeano pour construire l'ensemble des entiers naturels puis les différentes structures algébriques utilisées. L'intérêt des travaux de Hilbert sur cette question est donc surtout de l'ordre de la logique et peu géométrique. Bien avant de comprendre la dimension logique de la problématique et dans le courant du XIXe, sont nées d'autres géométries dans lesquelles la droite n'avait plus les mêmes propriétés que dans la géométrie euclidienne : les géométries non euclidiennes. En géométrie projective, des droites parallèles se coupent en un point impropre et par deux points ne passe qu'une seule droite. En géométrie hyperbolique, par un point donné, non situé sur une droite donnée, il passe au moins deux droites qui ne coupent pas la droite donnée. En géométrie elliptique, deux droites sont toujours sécantes. Un exemple classique de géométrie elliptique est la géométrie sur une sphère où le plus court chemin pour aller d'un point à un autre est une partie d'un grand cercle. Une droite est alors définie comme un grand cercle. Deux droites distinctes se coupent alors en deux points diamétralement opposés qui n'en forment qu'un pour cette géométrie. On retrouve la propriété : par deux points distincts passe une seule droite. De plus on peut aussi définir une droite comme un cercle de rayon infini. Cette définition est incompatible avec celle issue de l'algèbre linéaire. Dans ce contexte, on parle en général de géodésique pour éviter une confusion. Si l'espace vectoriel est muni d'une base, ou l'espace affine d'un repère, la droite peut être caractérisée par des équations. Une droite affine est l'ensemble des points M de coordonnées (x ; y) tels que Dans cette famille de droites, on rencontre m représente la pente de la droite. En dimension n, la droite passant par Ce système d'équations s'appelle un système d'équations paramétrées de la droite. Cas particulier de l'espace (dimension 3), en :Point de vue concret [modifier]
L'approche d'Euclide [modifier]
Définition formelle [modifier]
Applications [modifier]
Approche algébrique [modifier]
Motivations [modifier]
Géométrie vectorielle [modifier]
Géométrie affine [modifier]
 . Le vecteur v est appelé vecteur directeur de la droite.
. Le vecteur v est appelé vecteur directeur de la droite.Applications [modifier]
Logique et géométrie [modifier]
Motivation [modifier]
Rôle de Hilbert [modifier]
Géométries non euclidiennes [modifier]
Géométrie analytique [modifier]
Espace affine de dimension 2 [modifier]
 , où
, où  . Un vecteur directeur de la droite est le vecteur de coordonnées ( − b;a). L'équation précédente est appelée équation cartésienne de la droite.
. Un vecteur directeur de la droite est le vecteur de coordonnées ( − b;a). L'équation précédente est appelée équation cartésienne de la droite.
Espace affine de dimension n [modifier]
 et de vecteur
et de vecteur  est l'ensemble des points
est l'ensemble des points  pour lesquels il existe un scalaire k tel que
pour lesquels il existe un scalaire k tel que
Annexes [modifier]
Articles connexes [modifier]
Bibliographie [modifier]
Notes et références [modifier]
08:20 Publié dans Droite (mathématiques) | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
La quatrième relation
On peut aujourd'hui munir la géométrie du symbolisme spécifique cherché par Leibniz. Et ce symbolisme nous montre que la géométrie euclidienne repose sur quatre relations inséparables. Or de ces quatre relations nous continuons, vingt cinq siècles après Euclide, à n'en comprendre que trois ! Un sujet de réflexion aussi inédit que curieux.
Présentation Leibniz pensait que lorsque on saurait trouver une écriture opératoire pour les figures de la Géométrie, elle constituerait un Art d'Inventer comparable à celui qui venait de se produire dans l'Algèbre grâce à l'introduction par Viète d'une écriture opératoire pour les équations. Or ce projet qui fut jugé utopique autrefois peut être réalisé aujourd'hui. Il est présenté sur ce site avec les nouvelles perspectives qu'il ouvre effectivement pour la géométrie. Le contexte historique En 1591 Viète publie l'Isagoge. Dans ce livre il montre qu'il est possible en algèbre de calculer avec les lettres exactement comme on calculait auparavant avec les nombres. L'introduction de ce symbolisme marque une véritable révolution en mathématique. Là où Diophante est obligé d'énoncer « Partager un nombre donné tel que 100 par exemple en deux nombres dont la différence est donnée telle que 40 par exemple », il suffit dorénavant de dire : « Résoudre le système x+y=100 et x-y=40 ». De plus il permet de traiter directement la forme générale qui est « Résoudre le système x+y=a et x-y=b ». Les avantages du symbolisme ainsi introduit sont donc considérables. Ils viennent de ce que les énoncés rhétoriques d'antan ont été remplacés par une écriture opérationnelle à la fois réductrice et visuelle. Le livre a un grand succès et très rapidement l'algèbre prend un essor fulgurant. Chacun tient à cœur d'y apporter des améliorations. Par exemple Descartes est le premier à affecter les notations x et y aux inconnues. Dans la foulée il montre aussi que les droites, les cercles et autres lignes mathématiques peuvent être elles aussi représentées par des équations et c'est le début de l'analytique. Leibniz [1646–1716] apporte lui aussi sa contribution à l'édifice en posant les bases du calcul différentiel. Mais il a un projet beaucoup plus ambitieux qui est de trouver pour la géométrie la même écriture opératoire que celle que Viète vient de proposer pour l'algèbre, car il pense que l'analytique de Descartes n'est pas la bonne approche. Il donne à sa recherche le nom d'Analysis Situs. Par les descriptions extrêmement précises qu'il en fait dans ses notes nous comprenons à présent que cette écriture devait tenir à la fois des vecteurs et des complexes (voir la Note1). Mais en l'absence de ces connaissances indispensables il ne put pas mener son projet à bien. L'audace de Descartes autrefois L'introduction du symbolisme introduit par Viète permet alors une découverte qui est fondamentale. Dans son ouvrage La Géométrie publié en 1637 Descartes écrit "Il faut que je dise quelque chose sur la nature des équations" et il compare les deux équations (x-2)(x-3)(x-4)=0 et (x-2)(x-3)(x-4)(x+5)=0. Or comme à cette époque les nombres négatifs n'existent pas encore il est obligé d'admettre que ces deux équations différentes admettent pourtant les mêmes racines. Cette disparité qui n'était pas visuelle tant que les nouvelles notations n'avaient pas été introduites, devient désormais inacceptable et Descartes prend la décision de dire qu'il considère la seconde équation comme « une équation dans laquelle il y a quatre racines, à savoir trois vraies qui sont 2,3,4 et une fausse qui est 5 », et par la suite il traite absolument de la même façon les racines vraies et les racines fausses (Voir la Note2 ). C'est une innovation absolument remarquable car à cette époque elle va à l'encontre du sens commun. Elle consiste finalement à dire que parmi les quatre sommes u+v, u-v, v+u et v-u que l'on peut écrire avec deux nombres naturels u et v, où pour fixer les idées on suppose u>v, la quatrième doit être aussi bien acceptée que les trois autres. Or ce faisant il se met à dos toute la communauté mathématique. Comment peut on imaginer un segment qui ait la longueur fausse 5 ? Et puisque x+5=0 c'est à dire x=0-5 comment peut on imaginer qu'on puisse enlever 5 à 0 ? Plusieurs années après, en 1670, Pascal, dans les Pensées écrit ironiquement « Trop de vérité nous étonne. J'en sais qui ne peuvent comprendre que, qui de zéro ôte quatre, reste zéro ». (Voir la Note3 ) Et cette opposition se poursuit longtemps encore puisque en 1806 le grand mathématicien Carnot s'élève toujours contre cette possibilité. Dans un mémoire écrit à cette date il insère une Digression sur la Nature des Quantités dites Négatives où il écrit : « Il y a des personnes qui regardent les quantités négatives isolées comme moindre que 0; mais cette opinion ne paraît nullement soutenable; car pour obtenir une pareille quantité, il faudrait pouvoir ôter quelque chose de rien, ce qui est absurde . » Et plus loin il trouve complètement farfelu que le produit de deux nombres moins que rien tels -4 et -5 puisse ensuite être supérieur à celui des deux nombres 2 et 3 qui leur sont pourtant supérieurs. (Voir la Note4 ) Maintenant que nous avons le recul nécessaire, nous savons comme l'innovation de Descartes fut fructueuse. En effet elle ouvrait la voie à toutes les extensions qui suivirent, celle des réels, puis des complexes, puis des quaternions.., extensions qui devinrent les fondements de toutes les merveilleuses mathématiques que nous avons aujourd'hui. Or par les réticences que cette innovation rencontra non seulement au début, mais aussi sur de nombreuses années, nous mesurons l'audace de Descartes qui, pour une simple raison d'harmonie, eut le courage d'aller à l'encontre de ce "trop de vérité" que lui reprocha Pascal. Le conservatisme des mathématiciens d'aujourd'hui. Les développements que nous allons présenter dans les pages suivantes vont être d'une ressemblance étonnante avec l'exemple précédent. Le symbolisme introduit par Viète permettait d'écrire les équations de l'algèbre au lieu de les présenter sous la forme rhétorique qu'elles avaient avant lui. Pareillement le symbolisme que nous allons proposer va permettre d'écrire les figures de la géométrie au lieu de les décrire rhétoriquement comme le faisait Euclide il y a 25 siècles ... et comme le font encore les collégiens d'aujourd'hui, stagnation tout à fait unique dans l'histoire de la science .(voir Note 5) Mais surtout, par la visualisation simplificatrice qu'il donnait dorénavant aux opérations de l'algèbre, le symbolisme de Viète fit apparaître dans nos calculs sur les nombres cette anomalie que Descartes trouva inacceptable, et qui consistait à dire que sur les quatre sommes u+v, u-v, v+u et v-u seules les trois premières avaient un sens. Pareillement la visualisation simplificatrice de notre symbolisme permettra d'écrire les relations fondamentales de la géométrie sous la forme de quatre égalités de même premier membre où les seconds membres seront (u,v), (u,-v), (v,u) et (v,-u), et nous poserons qu'il est inacceptable de dire que seules les trois premières ont un sens. L'analogie continue malheureusement pour l'étape suivante. Comme on l'a vu les nombres négatifs furent d'emblée considérés autrefois comme absurdes car on ne leur trouvait pas de signification quand on essayait de les traduire avec les nombres alors connus. Et pareillement la quatrième relation qui va apparaître dans la géométrie euclidienne est aussi considérée comme absurde par les mathématiciens d'aujourd'hui car pour le moment on ne lui trouve pas de signification quand nous essayons de la traduire avec les nombres que nous connaissons. Dans les pages suivantes nous allons donc montrer ce qu'aurait probablement été ce symbolisme auquel Leibniz aspirait. Sa validité n'est pas mise en cause comme le montre par exemple la citation ci dessus d'une correspondance de Monsieur Kahane, membre de la section mathématique de l'Académie des Sciences. Ensuite la quatrième relation que les notations introduites sont les seules à faire apparaître nous place sur le seuil d'une extension prometteuse pour la géométrie euclidienne. Mais il reste à trouver le grand nom qui aura l'autorité et surtout l'audace de Descartes pour oser franchir ce seuil, et il n'y en a pas encore eu pour le moment. Raymond Pouzergues Notes (1) Les lecteurs intéressés par ces conceptions de Leibniz pourront les lire dans l'excellent ouvrage de Louis Couturat "La Logique de Leibniz " consultable sur Gallica [cliquer ici]. On y trouve son rejet de l'analytique car "la géométrie analytique n'exprime les faits géométriques que d'une manière détournée et compliquée " [p399], son ambition que l' écriture des figures à laquelle il aspire permette de calculer de façon qu'on puisse "exprimer par ce calcul toute la nature et la définition de la figure " [p392], la forme que doit avoir cette écriture telle que "dans le calcul géométrique les lettres ou symboles quelconques ne représentent plus des grandeurs ni des nombres comme en algèbre mais des points et des combinaisons de points " [p 410] et enfin son pressentiment des nombres complexes identifiables comme on le sait avec les similitudes du plan puisque " la théorie de la similitude est par suite le fondement de la véritable analyse de situation" [p411] (2) On peut consulter le texte entier au Livre III de son oeuvre: La Géométrie dont malheureusement on ne peut pas trouver le texte intégral sur Gallica. (3) On trouve cette citation dans les Pensées de Pascal l'Homme sans Dieu Chapitre I [La pléiade p 1109] (4) Le texte complet de cette Digression sur la Nature des Quantités dites Négatives se trouve dans Mémoire de Carnot [ cliquer ici ] à partir de la page 96. Il est vraiment surprenant. (5) Le véritable essor de chacune de nos connaissances se fait à partir du moment où nous lui trouvons une écriture dédiée. Ce fut non seulement le cas pour l'algèbre, l'analyse et de nombreuses autres branches des mathématiques, mais aussi pour les relations de la physique, les formules de la chimie et même les partitions de la musique. Or nous n'avons jamais franchi le pas en géométrie. En effet lorsque on lit un énoncé rhétorique tel que " Si une sécante rencontre deux autres droites en faisant des angles alternes-internes égaux alors ces deux droites sont paralléles" [Euclide- proposition 27 du Livre I], force nous est de constater qu'on peut le trouver encore tel quel dans le livre de n'importe lequel de nos collégiens d'aujourd'hui. Cette stagnation dans ce qui est probablement la plus ancienne de nos connaissances est tout à fait surprenant, et ce qui est plus surprenant encore c'est que Leibniz semble avoir été le seul dans l'histoire des mathématiques à en prendre conscience.
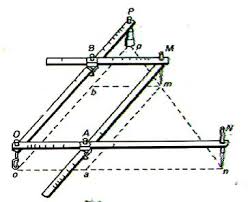
Les bivecteurs Dans cette page nous allons montrer ce qu'aurait probablement été l'Analysis Situs de Leibniz s'il avait réussi à la mettre au point. Nous nous contenterons d'une description générale qui suffira à en donner un aperçu. L'intuition de Leibniz était qu'il fallait d'abord disposer d'un outil qui prenne en compte non seulement la longueur comme le fait le segment, mais aussi la situation c'est à dire la direction et le sens. Il anticipait ainsi le vecteur dont la théorie allait être élaborée au XIX° siècle. Nous la supposerons connue. Rappelons qu'un même vecteur v est représenté par l'ensemble des flèches de même longueur, de même direction et de même sens. Comme nous allons principalement travailler avec eux les notations telles que AB, CD….désigneront toujours des vecteurs. Dans les autres cas nous expliciterons cas par cas les ensembles eux aussi définissables par deux points en mentionnant par exemple : soit la droite AB, soit le segment AB, soit la longueur AB, soit le diamètre AB, etc etc. Ensuite l'intuition de Leibniz était de fonder son Analysis Situs sur la similitude. Par suite nous conviendrons Si ( AB,AC)=(A'B',A'C') cela signifie que c'est la même similitude directe qui fait passer de AB à AC et de A'B' à A'C'. On dit alors que les triangles ABC et A'B'C' sont directement semblables. Et si (AB,AC)=)A'B',A'C'( c'est que les similitudes qui font passer de AB à AC et de A'B' à A'C' sont inverses l'une de l'autre. On dit alors que les triangles ABC et A'B'C' sont inversement semblables. Ces notations purement géométriques auraient effectivement pu être trouvées par Leibniz et elles respectent bien sa volonté que « …les lettres ou symboles quelconques ne représenteront plus des grandeurs ni des nombres comme en algèbre, mais des points et des combinaisons de points ». Alors iI est remarquable de constater qu'elles suffisent pour pouvoir retrouver tous les résultats de la géométrie euclidienne. _________________________________ Egalités des bivecteurs Nous appellerons bivecteurs ces couples de vecteurs. En se basant sur les propriétés des triangles semblables auxquels ils sont associés il est possible de donner les propriétés de toutes les égalités qu'ils permettent d'écrire. Mais aujourd'hui nous disposons d'un moyen beaucoup plus commode en identifiant chaque vecteur à son affixe complexe. Ainsi si u, v, u', v' sont respectivement des vecteurs ou bien les affixes complexes des vecteurs OA,OB,OA',OB' alors l'égalité (OA,OB)=(OA',OB') c'est à dire (u,v)=(u',v') correspond tout simplement à l'égalité complexe des rapports v/u=v'/u'. Les triangles OAB et OA'B' sont directement semblables. Et de même l'égalité (OA,OB)=)OA',OB'( c'est à dire (u,v)=)u',v'( correspond à l'égalité du rapport v/u avec le conjugué du rapport v'/u'. Et cette fois ci les triangles OAB et OA'B' sont dits inversement semblables. Nous conserverons la même appellation que pour les complexes en disant que le bivecteur )u,v( est le conjugué du bivecteur (u,v). Addition des bivecteurs L'ensemble des bivecteurs peut être muni d'une addition par la convention suivante: (u,v) + (u',v') = (OA,OB)+(OA',OB') = (OA,OB)+(OB,OC)= (OA,OC) c'est la relation que nous appelons en France relation de Chasles c'est à dire (u,v) + (v,w) = (u,w) qui, avec les nombres complexes s'écrit (v/u).(w/v) = w/u - cette addition donne à l'ensemble des bivecteurs une structure de groupe commutatif d'élément neutre le bivecteur nul (u,u)=0 - comme (u,v)+(v,u)=(u,u)=0 le bivecteur (v,u) est l'opposé du bivecteur (u,v). Propriétés des bivecteurs La correspondance avec les rapports de nombres complexes permet d'obtenir directement toutes les propriétés nécessaires dans les calculs utilisant les bivecteurs. Signalons en quelques unes: - On a (-u,-v)=(u,v) et (-u,v)=(u,-v) ce qui permet de convenir d'une forme canonique pour les bivecteurs en ne les faisant jamais commencer par un vecteur précédé du signe -. - Si (u,v)=(u',v') alors (u,u')=(v,v') ou bien (v,u)=(v',u') ou bien …. - Quel que soit un nombre k réel alors (u,v) = (ku,kv) - Quels que soient k et h alors (u,v) = (u',v') donne (u,v) = (ku+hu',kv+hv') - Quels que soient les réels k,h,p,q alors (u,v) = )u',v'( donne (ku+hv,pu+qv) = )ku'+hv',pu'+qv'( et ainsi de suite. ... Nous dirons que les égalités de la forme (u,v)=)u',v'( sont des égalités mixtes. Elles vont jouer un rôle prépondérant car elles font intervenir la symétrie cette relation à laquelle les chercheurs, à travers la chiralité, accordent une grande importance pour la compréhension de notre univers. Les trois relations fondamentales De la même façon que l'étude des nombres commence par la considération de ceux qui sont les plus simples, nous allons chercher quelles sont les égalités mixtes les plus simples qu'il est possible d'écrire. Pour être non triviales elles doivent évidemment comprendre au moins deux vecteurs. En tenant compte de la forme canonique et des équivalences posées au paragraphe précédent on obtient alors quatre et seulement quatre relations qui sont (u,v)=)u,v( ; (u,v)=)v,u( ; (u,v)=)u,-v( et enfin (u,v)=)v,-u( L'égalité (u,v)=)u,v( impose que le complexe v/u soit égal à son conjugué c'est-à-dire que ce rapport soit réel. Par suite si (u,v)=)u,v( alors les vecteurs u et v sont colinéaires. L'égalité (u,v)=)v,u( impose que le produit de v par son conjugué soit égal au produit de u par son conjugué, c'est-à-dire que leurs normes sont égales. Par suite si (u,v)=)v,u( alors les vecteurs u et v sont isométriques. L'égalité (u,v)=)u,-v( impose que le complexe v/u soit opposé à son conjugué, c'est-à-dire que ce rapport soit un imaginaire pur. Par suite si (u,v)=)u,-v( alors les vecteurs u et v sont orthogonaux. Si nous laissons pour le moment de coté la quatrième relation qui sera traitée à la page suivante nous observons que les trois égalités mixtes les plus simples que nous pouvons écrire avec les bivecteurs correspondent justement aux relations qu'Euclide a donné pour bases à la géométrie euclidienne. Les trois relations fondamentales L'axiomatisation d'Euclide manquait de rigueur. En 1930 David Hilbert a fait paraître la dernière version d'un livre qui fait autorité en la matière "Les Fondements de la Géométrie" dans lequel il montre que celle-ci est toute entière déterminée par la seule donnée de 21 axiomes. Il les répartit en axiomes d'appartenance, d'ordre, de continuité et enfin seulement trois axiomes relationnels : le parallélisme des droites, la congruence des segments et la congruence des angles. Mais comme il ne se sert de cette dernière que pour démontrer les cas d'égalité des triangles quelconques, il aurait pu la remplacer par la relation de perpendicularité, puis s'en servir pour démontrer les cas d'égalité des triangles rectangles et passer ensuite aux triangles quelconques. Ainsi il est indifférent de remplacer la relation concernant la congruence des angles par la relation de perpendicularité.
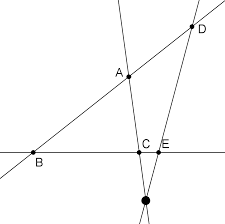
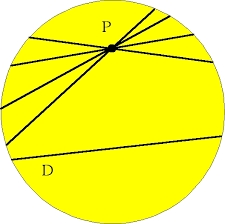
Ainsi, au contraire d'Euclide et de Hilbert qui se sont seulement laissés guider par l'intuition, c'est par une démarche systématique que les bivecteurs font apparaître les trois relations fondamentales de la géométrie. Ensuite, de même qu'en arithmétique les chiffres permettent d'écrire tous les nombres, ces relations fondamentales vont nous permettre d'écrire toutes les figures de la géométrie. Par exemple l'ensemble des points M situés sur la droite passant par les deux points distincts A et B est défini par la relation (MA,MB)=)MA,MB(, et l'ensemble des points du plan situés sur le cercle de diamètre AB est défini par la relation (MA,MB)=)MA,BM( ces deux relations pouvant d'ailleurs prendre de multiples formes différentes. Enfin une écriture opératoire pour les figures de la géométrie. Les bivecteurs permettent " d'écrire " les figures élémentaires de la géométrie au lieu de les décrire rhétoriquement comme nous le faisons encore maintenant et ce depuis Euclide en énonçant par exemple " On appelle triangle isocèle ABC de sommet A un triangle tel que ....". Dorénavant: le triangle isocèle ABC de sommet A s'écrit (AB,AC)=)AC,AB( le triangle rectangle ABC de sommet A s'écrit (AB,AC)=)AB,CA( le triangle équilatéral ABC s'écrit (AB,AC)=(BC,BA) le triangle rectangle isocèle de sommet A s'écrit (AB,AC)=(AC,BA) le quadrangle harmonique ABCD s'écrit ( AC,DA)=(BC,BD) ........... Ensuite, de même que tous les nombres peuvent s'écrire à l'aide d'un ou de plusieurs chiffres, toutes les figures de la géométrie pourront s'écrire à l'aide d'une ou de plusieurs relations. Et si on convient d'appeler figures élémentaires celles qui s'écrivent au moyen d'une seule relation, on peut s'apercevoir que leur nombre est déjà assez conséquent puisqu'il résulte, en exceptant les vecteurs nuls, de toutes les combinaisons qu'il est possible d'écrire avec huit lettres différentes ou non dans des égalités mixtes ou non. Le grand intérêt de cette notation est évidemment que chaque "écriture" est non seulement succinte mais que pourtant elle contient en elle-même l'ensemble des propriétés de la figure qu'elle définit. Par exemple l'écriture textuelle « quadrangle harmonique » contient 20 lettres et ne nous donne aucune information sur la figure qu'elle désigne, à part que c'est un quadrangle. Il nous faut donc "apprendre" ces propriétés si nous voulons les connaitre. Par contre l'écriture (AC,DA)=(BC,BD) ne contient que 8 lettres et, malgré cette concision, en appliquant les règles de calculs sur les bivecteurs, on peut en déduire absolument toutes les propriétés du quadrangle harmonique. Donnons un exemple. Soit I le milieu de AB alors: (AC,DA) = (BC,BD) = (AC+BC,BD+DA) = (2 IC,BA) = ( 2 IC, 2 IA) = (IC, IA) de même : (AC,DA) = (BC,BD) = (AC-BC, DA-BD) = (AB,2 DI ) = (2 AI, 2 DI) = (AI,DI) = (IA,ID) Il en résulte que les trois triangles BCD, IAD, et ICA sont directement semblables d'où plusieurs propriétés concernant les angles et les longueurs de la figure. Par exemple en considérant la proportionnalité des cotés on en déduit: Dans un quadrangle harmonique les produits des cotés opposés sont égaux. ou encore Dans un quadrangle harmonique le produit des diagonales est égal au demi produit des cotés. ou encore puisque (AC,DA)=(BC,BD) est équivalent à )AC,DA(=)BC,BD( par soustraction membres à membres on obtient (AC,DA)-)AC,DA(=(BC,BD)-)BC,BD( c'est à dire: (AC,AD) - )AC,AD( = (BC,BD) - )BC,BD( il est facile de voir que cette relation permet d'énoncer: Dans un quadrangle harmonique les quatre sommets sont sur un même cercle etc etc . Conclusion Si Leibniz avait pu mettre son Analysis Situs au point il est probable que leur pratique ultérieure aurait évidemment introduit à la longue de nombreux raccourcis de démonstrations. Il est d'ores et déjà facile d'en trouver quelques uns. Mais ce n'est pas le but ici. En fait ses espérances étaient beaucoup plus ambitieuses. En effet en plus d'une approche complètement différente de la géométrie, et d'une écriture fonctionnelle de ses figures, il considérait que son Analysis Situs devait surtout être un Art d'Inventer, c'est à dire permettre des découvertes impossibles avec les autres approches. C'est ce que nous allons voir dans la page suivante.
l'Anoptrie Apparition de l'Anoptrie. Dans la page précédente, en cherchant quelles sont les égalités mixtes les plus simples qu'il soit possible d'écrire, nous avons vu qu'on obtient quatre et seulement quatre relations qui sont (u,v)=)u,v( ; (u,v)=)v,u( ; (u,v)=)u,-v( et enfin (u,v)=)v,-u(. Nous ne nous sommes intéressés qu'aux trois premières. Si nous explicitons la quatrième relation avec les complexes elle se traduit par ||u||²+||v||²=0 . Par suite nous trouvons absurde de vouloir la prendre en considération. On se trouve exactement dans la même situation que ceux qui autrefois n'accordaient de sens qu'aux sommes u+v, u-v, v+u et trouvaient absurde qu'on puisse vouloir considérer v-u. L'audace de Descartes en posant l'existence de nombres faux, a été de mettre cette quatrième opération sur le même pied d'égalité que les trois autres. Nous allons faire comme lui et mettre cette quatrième relation sur le même pied d'égalité que les trois autres. Nous l'appellerons Anoptrie ( formé sur le privatif a et la racine grecque optos=visible). Mais comme elle n'est pas accessible par l'écriture classique des complexes, nous utiliserons son écriture bivectorielle avec les seules règles de calcul qui ont été vues à la page précédente. Premières propriétés de l'anoptrie Nous dirons donc que deux vecteurs u et v sont anoptriques lorsqu'ils seront liés par la relation (u,v)=)v,-u(. Cette relation n'est pas réflexive mais elle est symétrique ce qui se voit facilement. Quant à la transitivité, si u est anoptrique à v et si v est anoptrique à w alors: (u,v)=)-v,u( et (v,w)=)w,-v( implique par addition que (u,w)=) w,u( L'anoptrie n'est pas transitive, mais nous obtenon ce résultat intéressant: Si deux vecteurs u et w sont anoptriques à un même vecteur v alors ils sont isométriques entre eux . Triangles anoptriques Intéressons nous à présent aux figures élémentaires du plan qui font intervenir l'anoptrie. Exercice I On sait que dans un triangle rectangle ABC la médiane AI partage ce triangle en deux triangles isocèles, et que dans un triangle isocèle ABC la médiane AI partage ce triangle en deux triangles rectangles. Cherchons alors quelle peut bien être la propriété de la médiane AI d'un triangle anoptrique ABC de sommet A ? (AB,AC)=)AC,BA( cad (AB+AC,AB+CA)=)AC+BA,AC+AB( cad (2 AI , CB)=)BC, 2 AI( cad (AI,CI)=)IC,AI( cad (IA,IC)=)IC,AI( Il en résulte que le triangle AIC est lui aussi anoptrique de sommet I. Et comme la démonstration est évidemment la même quand on travaille avec le triangle AIB on peut énoncer : Théorème : la médiane d'un triangle anoptrique partage ce triangle en deux triangles qui sont eux aussi anoptriques. Exercice II Dans un triangle isocèle les deux triangles formés par la médiane sont inversement semblables, et dans un triangle rectangle ces deux triangles sont isocèles. Qu'en est il pour le triangle anoptrique ABC de médiane AI ? (AB,AC)=)AC,BA( cad (AB,CB)=)AC, AB+AC( cad (AB,2 IB)=)AC, 2 AI( cad (BA,BI)=)AC,AI( Les deux triangles BAI et ACI sont inversement semblables. Enonçons Théorème : la médiane au sommet d'un triangle anoptrique le partage en deux triangles inversement semblables. Exercice III Dans un triangle isocèle les angles à la base sont égaux, dans un triangle rectangle ils sont complémentaires. Etudions ceux qui sont à la base d'un triangle anoptrique ABC. (AB,AC)=)AC,BA( cad (BA,BC)=)CA,CA+BA( Posons D tel que BA = AD on obtient : (BA,BC) = )CA, CD( = )CA,CB( + )CB,CD( Comme C n'est pas aligné avec A,B et D l'angle de CB avec CD est quelconque. Par conséquent: Théorème: En général il n'existe pas de relation particulière entre les angles à la base d'un triangle anoptrique Exercice IV Dans les triangles habituels la somme des trois angles du triangle est égale à l'angle plat. En est il de même pour un triangle anoptrique ABC de médiane AI. (AB,AC)=)AC,BA( cad (CA, CA+AB)=)AB, AB+AC( cad (CA,CB)=)AB, 2 AI( (AB,AC)+(BC,BA)+(CA,CB) = )AB,2 AI(+)2 AI, AC(+)AC,BA( = )AB,BA( cqfd Théorème: Comme pour tous les autres triangles de la géométrie euclidienne, la somme des angles d'un triangle anoptrique est égale à un angle plat. On arrive alors à une géométrie étonnante. Exemple I Considérons le triangle ABC anoptrique de sommet A on a donc (AB,AC) = )AC,BA( c'est-à-dire que pour les longueurs qui se trouvent dans cette relation on a : Par conséquent les deux cotés relatifs au sommet d'un triangle anoptrique sont égaux, or nous avons vu que les angles à la base de ce triangle ne sont pas égaux! Enonçons: Un triangle anoptrique est un triangle qui a deux cotés égaux, mais ses angles à la base ne sont pas égaux. Exemple II Nous avons vu que la médiane AI d'un triangle anoptrique ABC partage ce triangle en deux triangles inversement semblables BAI et ACI. Leurs cotés sont donc proportionnels et en particulier AI/CI=IB/IA c'est-à-dire IA² = IB x IC et comme I est le milieu de BC on a IA = IB = IC. Enonçons: Le pied de la médiane d'un triangle anoptrique est équidistant des trois sommets du triangle mais ce triangle n'est pas rectangle. Conclusion Continuons à comparer la découverte des négatifs avec la découverte de l'anoptrie. En travaillant, grâce aux notations introduites par Viète, sur les nombres négatifs qu'il appelait des nombres "faux", Descartes arrivait à des résultats qui lui paraissaient sûrement étranges. Il pouvait par exemple énoncer: Dans le nouvel ensemble que nous venons d'obtenir il existe deux catégories de nombres entiers qui ont pour produit 6. Ce sont d'une part les couples de nombres "vrais" à savoir (1,6) et (2,3), et d'autre part des couples de nombres "faux" à savoir (-1,-6) et (-2,-3). De même en travaillant, grâce aux bivecteurs, dans notre nouvelle géométrie, nous pouvons énoncer des résultats ici encore étranges. Par exemple Dans la nouvelle géométrie que nous venons d'obtenir il existe deux catégories de triangles qui ont deux cotés égaux. Ce sont d'une part les triangles isocèles qui ont leurs angles à la base égaux, et d'autre part les triangles anoptriques qui n'ont pas les angles à la base égaux. Ou encore Dans la nouvelle géométrie que nous venons d'obtenir il existe deux catégories de triangles qui sont inscriptibles dans un cercle ayant leur base pour diamètre. Ce sont d'une part les triangles rectangles qui ont leurs angles à la base complémentaires, et d'autre part les triangles anoptriques qui n'ont pas leurs angles à la base complémentaires. Notre stupéfaction est alors au moins égale à celle de Carnot dans sa Digression sur la Nature des Quantités dites Négatives. Il y énonce tout un tas de bizarreries qui nous font sourire aujourd'hui, mais qui pouvaient effectivement paraître étonnantes dans les débuts. Or il y avait quand même déjà 170 ans que Descartes avait introduit les nombres négatifs! Pareillement l'anoptrie va offrir tout un tas de bizarreries dont nous ne venons de donner qu'un échantillon et qui par la suite participeront aux fondements de la géométrie euclidienne étendue à laquelle elle va donner naissance.
Objections On trouvera ci dessous une compilation des objections et des questions qui m'ont été faites depuis la première présentation en 1988 de cette conception au congrés de géométrie organisé par les IREM de Montpellier où elle figure dans les actes de ce colloque sous le titre: Les bivecteurs et les complexes Les bivecteurs ne sont qu'une écriture différente des nombres complexes. Introduire une notation nouvelle ne fait que compliquer inutilement les choses! Les bivecteurs sont aux nombres complexes ce que les entiers relatifs sont aux entiers naturels. Dans leur partie commune on peut effectivement les confondre. Mais les relatifs permettent de donner un sens à des expressions telles que 3-5 alors qu'elle n'a pas de sens dans l'ensemble des naturels. Quelles possibilités les bivecteurs offrent ils de plus que les complexes ? Le premier exemple est que les bivecteurs donnent un sens à l'anoptrie alors que ce n'est pas le cas des complexes. Pareillement les relatifs donnaient un sens à la soustraction 3-5 ce que ne permettaient pas les nombres naturels. Mais l'étude des bivecteurs montrera d'autres extensions impossibles avec les complexes. Par exemple, au contraire des complexes, ils peuvent s'étendre à l'espace oridinaire. Pour cette extension on convient que deux bivecteurs de l'espace seront égaux ssi, en plus des conditions déjà posées, les plans qu'ils définissent sont parallèles. On définit ensuite l'addition de deux bivecteurs quelconques (PQ,PR) et (P'Q',P'R') de la façon suivante: soient O et B deux points distincts sur l'intersection des plans PQR et P'Q'R'; alors dans le plan PQR on construit (OA,OB)=(PQ,PR) et dans le plan P'Q'R' on construit (OB,OC)=(P'Q',P'R'). L'addition de ces deux bivecteurs est alors définie par: (PQ,PR)+(P'Q',P'R') = (OA,OB)+(OB,OC)=(OA,OC) L'huis clos des nombres Vous dites que, selon la prémonition de Leibniz, les bivecteurs sont un outil purement géométrique qui ne fait pas intervenir le nombre. Or les vecteurs sont munis d'une loi de composition externe sur un ensemble qui est R par exemple? Oui. Et on s'est autorisé à écrire 2 AB au lieu de AB+AB. Mais à part quelques simplifications de ce genre il est facile de voir que la multiplication des vecteurs par un réel n'est ni nécessaire ni souhaitable. Pour que deux vecteurs soient égaux il faut que leurs normes soient égales. Pour que deux bivecteurs soient égaux il faut que le rapport de leurs normes soient égales. Or ces normes sont bien des réels? La norme est une connaissance qui permet de savoir si un vecteur est plus grand ou plus petit qu'un autre. Or dans la géométrie telle que nous la construisons cette connaissance est inutile. Il faut simplement savoir si deux vecteurs sont isomètriques ou non. Même chose pour les rapports des normes. Le vocabulaire nécessaire pour traduire ces propriétés manque. Le nom de norme est donc utilisé à défaut d'autre mais effectivement il est incorrect. Pourquoi ce parti pris contre le nombre ? Parce que, pour reprendre une image de Platon, le nombre nous maintient dans une espèce de caverne numérique, une espèce de huis clos. Il n'engendre que ce qu'il est programmé à engendrer. Seule la géométrie réussit à nous en sortir. Par exemple les entiers naturels de l'antiquité n'engendraient que des rationnels. C'est par la géométrie que nous avons pu aller plus loin grâce à la célèbre démonstration d'Hippase de Metaponte qui, en utilisant le thèorème de Pythagore, a montré que la mesure de la diagonale du carré unitaire ne pouvait pas être rationnelle. De même dans l'analytique de Descartes deux droites parallèles ne pouvaient pas se couper. Et c'est en utilisant la géométrie pure que Poncelet a découvert la géométrie projective qui allait plus tard ouvrir la voie à toutes les géométries non euclidiennes. Aussi, essayer de faire des découvertes en géométrie en passant par les nombres, comme nous le faisons actuellement, aurait consisté pour Poncelet a essayer de découvrir sa géométrie projective en utilisant l'analytique. C'était impossible. Actuellement l'anoptrie n'est pas acceptée pour la seule raison que si nous l'abordons avec notre notation actuelle des complexes elle est "vide" (voir note 1). Observons que si ce critère avait été appliqué à la géométrie projective en l'abordant avec l'outil numérique dont on disposait à l'époque, c'est à dire l'analytique de Descartes, elle aurait subi le même sort. Heureusement elle était assez élémentaire pour pouvoir être visualisée par les projections. Aussi elle fut prise en considération et quelques années après les coordonnées projectives permirent de lui apporter l'outil qu'il lui fallait. Car si le nombre est un mauvais maître il est par contre un excellent serviteur. C'est quand même rassurant de savoir que vous ne bannissez pas complètement le nombre ! Bien évidemment. Mais les exemples qui viennent d'être donnés montrent que le nombre est pour ainsi dire " interprétatif " et qu'il n'est pas " créatif ". - C'était donc une erreur dans l'antiquité de rejeter l'existence des irrationnels pour la raison qu'ils ne s'exprimaient pas comme des rapports d'entiers naturels les seuls nombres alors connus. Ces exemples et sans doute bien d'autres encore montrent que les nombres opèrent chaque fois dans un ensemble dont ils nous empêchent de sortir c'est à dire en quelque sorte pour reprendre l'image de Platon à l'intérieur d'une espèce de "caverne numérique".(voir note 3) Les lacunes actuelles Pour en revenir à votre développement il est plein de lacunes. Par exemple dire que l'équation (MA,MB) = )MA,BM( est celle du cercle de diamètre AB est inexact car dans cette équation le point M ne peut être ni en A ni en B ? Oui. Le cas des vecteurs nuls est une singularité à prendre en compte. Mais elle ne suffit pas à invalider l'utilisation des bivecteurs de même que le cas des dénominateurs nuls n'invalide pas les calculs avec les fractions. Observons d'ailleurs que les transformations autorisées avec les bivecteurs permettent presque toujours de contourner ces singularités. Par exemple ici, en posant I milieu du segment AB, la relation devient (2 MI,BA)=)BA,2 MI( qui autorise les positions de M en A ou en B. Votre exposé n'est pas cohérent non plus car vous dites par exemple que deux vecteurs AB et CD sont isomètriques quand ils vérifient la relation (AB,CD)=)CD,AB(. Mais ensuite vous dites que si (AB,CD)=)CD,BA( ils ne sont pas isomètriques, et quelques lignes plus loin qu'ils sont isomètriques. C'est proprement incompréhensible ! Oui c'est vrai. Cette confusion vient du fait que nous faisons les premiers pas avec la quatrième relation. De même Descartes semait lui aussi la confusion en parlant de nombre "vrai" 5 et de nombre " faux" 5. Il faut réaliser que dans la géométrie basée sur les quatre relations il va y avoir désormais une analogie complète entre les directions et les isométries. Cette analogie permet de clarifier les choses. Par exemple si, au lieu d'être des êtres d'un espace à trois dimensions, nous étions des êtres d'un espace à une seule dimension nous n'aurions pas conscience de l'orthogonalité. Alors nous dirions que les vecteurs MA et MB tels que (MA,MB)=)MA,MB( sont liés par une colinéarité "vraie", et que si (MA,MB)=)MA,BM( ils sont liés par une colinéarité "fausse". On observerait alors la même confusion. Mais comme nous ne sommes pas des êtres de dimension un et que nous concenvons les angles droits nous disons que cette colinéarité "fausse" est tout simplement l'orthogonalité. C'est un aveuglement semblable qui nous empêche de distinguer ce que sont l'isomètrie "vraie" et l'isomètrie "fausse" et ces deux appellations ressemblantes sont effectivement trompeuses car elles sont aussi différentes entre elles que la colinéarité et l'orthogonalité. Par exemple à cause de sa propriété involutive l'orthogonalité est en quelque sorte une anti-colinéarité. De même l'anoptrie, elle aussi involutive, est une espèce d'anti-isomètrie. Notre conservatisme irrémissible La géométrie euclidienne a été étudiée depuis des millénaires et on sait tout sur elle depuis longtemps. Il est utopique de croire pouvoir "trouver quoi que ce soit que des milliers de spécialistes internationaux n'aient pas encore trouvé en dépit de décennies de labeur acharné " [Jean Pierre Demailly] Ce serait utopique si quelqu'un découvrait que les développements présentés ici sont erronés ou bien ont déjà été proposés. Or ce n'est pas le cas. La géométrie euclidienne est aujourd'hui une vieille lune. Les mathématiciens sont tous d'accord pour dire que son étude n'offre plus d'intérêt et leurs préoccupations vont dorénavant vers les géométries non euclidiennes.[Jean Dieudonné] C'est un fait que les mathématiciens d'aujourd'hui poursuivent leurs recherches vers d'autres géométries. Mais voici sur ce sujet les avis autorisés de deux grands noms. Dans son livre La Science et l'Hypothèse écrit en 1902, Henri Poincarré écrit:Que doit on penser de cette question: "La Géométrie Euclidienne est elle vraie?" Elle n'a aucun sens. Autant demander si le système métrique est vrai et les anciennes mesures fausses; si les coordonnées cartésiennes sont vraies et les coordonnées polaires fausses. Une géométrie ne peut pas être plus vraie qu'une autre; elle peut seulement être plus commode. Or la géométrie euclidienne est et restera la plus commode" Et Einstein dans un discours qu'il prononça devant l'Académie des Sciences de Berlin le 27 janvier 1921 et qui a été édité en français chez Gauthier-Villard en 1953 sous le titre La Géométrie et l'Expérience, déclara : « De toutes les autres géométries axiomatiques concevables, la Géométrie Euclidienne se distingue par la simplicité. Et comme la géométrie axiomatique pure ne contient pas d'énoncés sur la réalité accessible à l'expérience, mais seulement la géométrie axiomatique en liaison avec des propositions physiques, il devrait être possible et raisonnable, quelle que soit la nature de la réalité, de conserver la Géométrie Euclidienne » . Impossible d'être plus clair: quelle que soit la nature de la réalité il est raisonnable de conserver la Géométrie Euclidienne ! Ce qui compte dans une notion mathématique nouvelle c'est son utilité. Or l'anoptrie est inutile. C'est effectivement une des conceptions possibles des mathématiques où on distingue deux attitudes fondamentalement différentes: celle des maths pures et celle des maths appliquées. Les maths pures s'intéressent à la connaissance pour la connaissance. L'anoptrie ne se justifie pour le moment que sous ce dernier point de vue par l'harmonie absolument parfaite avec laquelle elle s'intègre aux trois autres relations fondamentales. C'est vrai que pour le moment nous ne la comprenons pas et par conséquent nous ne lui trouvons pas d'utilité. Mais au lieu de la rejeter nous devrions chercher à lui trouver son interprétation géométrique, ce qui peut effectivement demander beaucoup de temps. Souvenons nous qu'il s'est écoulé plus de deux siècles entre la découverte des complexes et la compréhension de leur signification géométrique. Pourquoi les scientifiques ne vous suivent ils pas ? Les raisons qu'ils donnent viennent d'ètre exposées ci dessus. On voit qu'elles sont aussi réfutables que l'étaient autrefois, la raison de "vérité" donnée par Pascal ou la raison "d'absurdité" donnée par Carnot pour s'opposer aux nombres négatifs c'est à dire pour refuser exactement de la même façon de mettre sur le même pied d'égalité les quatre opérations u+v,u-v,v+u et v-u. Le manque de curiosité des scientifiques devant la quatrième relation est par conséquent décevant à moins d'accepter l'explication qu'en donne Jean François Revel dans son livre La Connaissance Inutile publié en 1988 où il écrit: « Les idées qui nous intéressent le plus ne sont pas les idées nouvelles, ce sont les idées habituelles. L'essor de la science depuis le XVII° siècle nous incite à prêter à la nature humaine un congénital appétit de connaissances et une insatiable curiosité pour les faits. Or, l'histoire nous l'enseigne, si l'homme déploie, en effet, une intense activité intellectuelle, c'est pour construire de vastes systèmes explicatifs aussi verbeux qu'ingénieux, qui lui procurent le calme de l'esprit dans l'illusion d'une compréhension globale, plutôt que pour explorer humblement les réalités et s'ouvrir à des informations inconnues. La science, pour naître et se développer, a dû et doit encore lutter contre cette tendance primordiale, autour d'elle et dans son propre sein : l'indifférence au savoir » Pour pouvoir parler d'indifférence encore faudrait-il que de grands mathématiciens aient été mis au courant. Dés le début, dans les années quatre vingt, j'ai informé quelques grands noms des mathématiques. Monsieur Dieudonné m'a répondu que la "géométrie pure était une vieille lune". Monsieur Demailly que "la géométrie euclidienne avait été étudiée depuis des siècles voire des millénaires". Monsieur Cartan, qui fut le plus aimable puisqu'il m'a même accordé une entrevue, transforma devant moi la relation (u,v)=)v,-u( en ||u||²+||v||²=0 et il me déclara sur le champ qu'il était "absurde" de vouloir aller plus loin. Quand aux autres grands noms actuels comme Monsieur Connes (voir note 4) ou Monsieur Gromov ils ne m'ont pas donné leurs avis soit parce qu'ils n'ont pas d'autres raisons que celles données plus haut, soit, plus probablement, parce qu'ils sont effectivement indifférents à cette idée nouvelle . Mais enfin réalisez vous de quelle suffisance vous faites preuve en vous opposant à des avis aussi illustres ? Bien sûr que j'en ai conscience. Et c'est même la raison pour laquelle j'ai laissé dormir pendant des dizaines d'années au fond de mes tiroirs ces conceptions qui remontent maintenant à presque trente ans! Mais rien n'y fait et constamment elles reviennent à la charge. Je suis exactement dans la position de ce berger d'il y a cinq ou six mille ans qui fut le premier à observer que dans le ciel certains astres se mettent parfois à reculer. Les plus grandes autorités de l'époque pouvaient bien lui affirmer que l'univers tournait autour de la terre, et lui n'être que le plus humble et le plus insignifiant des hommes, chaque fois qu'il regardait le ciel il devait se dire que le géocentrisme n'était pas la bonne explication. Il n'y avait aucune suffisance dans cette attitude. De même, dans la simplicité de l'anoptrie et dans l'harmonie avec laquelle elle s'intègre aux trois autres relations de la géométrie, il y a une force de conviction qui l'emporte sur toutes les objections aussi augustes soient elles. L'universalité de cette conception. Une force de conviction devrait s'imposer à tout le monde. Oui. Mais en pratique on observe que ce n'est pas le cas. Par exemple quand Galilée a montré que des satellites tournaient autour de Jupiter, c'était une force de conviction suffisante pour prouver que l'univers n'était pas géocentrique. Et pourtant elle n'a pas convaincu. Ici la force de conviction vient des trois observations manifestes suivantes: D'abord le vecteur qui prend en compte toutes les informations données par un couple de points montre de façon évidente que le segment sur lequel Euclide a fondé notre géométrie était un outil trop rudimentaire. Ensuite nous savons maintenant, d'après les travaux de Félix Klein exposés dans le Programme d'Erlangen, que la similitude est la transformation caractéristique de la géométrie euclidienne. Il en résulte que l'outil spécifique de cette géométrie ne peut être que le bivecteur. Enfin ces bivecteurs permettent d'écrire quatre relations élémentaires, pas une de plus et pas une de moins. L'intuition d'Euclide et de Hilbert a pris pour base les trois qui nous sont perceptibles. Penser que la géométrie va se limiter à ces trois relations pour la seule raison que nous ne comprenons pas la quatrième est manifestement très prétentieux. Quoi qu'il en soit c'est seulement la reconnaissance par les autres mathématiciens qui importe ! Effectivement. Mais l'universalité de cette notion nouvelle procure une satisfaction indépendante. C'est sans doute ce que voulait dire Platon quand il écrit que " la Géométrie est une merveille qui manifeste son caractère divin à l'homme capable de la concevoir " [Epinomis §990]. En effet nous savons aujourd'hui que notre univers est constitué d'une infinité de galaxies. Il n'y a aucune raison pour que nous soyons les seuls êtres vivants dans cette multitude. Et de même il est presque sûr que de nombreuses civilisations y ont atteint un stade de développement semblable ou supérieur au notre avec, comme nous l'avons fait, une convention de notation c'est à dire d'écriture pour leur langage et pour leurs nombres. Alors, parmi ces civilisations, celles qui auront cherché à se munir d'une écriture pour la géométrie auront forcément abouti elles aussi aux bivecteurs puisque nous avons vu qu'il est impossible de passer outre. Elles auront abouti aux mêmes observations que celles que nous avons faites. Et parmi elles certaines auront éclairci le mystère de l'anoptrie. Quant à nous, par aveuglement volontaire, nous allons continuer pendant longtemps encore à considérer la géométrie comme étant ce mouton à trois pattes qu'Euclide nous a construit il y a vingt cinq siècles, et que D Hilbert vient de rafistoler il y a moins d'un siècle. Conclusion Je voudrais maintenant remercier ceux qui auront eu la patience de lire ces pages jusqu'à ces dernières lignes. Et, contrairement à l'usage, qu'on me permette de terminer par la citation d'une profession de foi qu'Einstein jugea si importante qu'il en fit la conclusion de son livre L'Evolution des Idées en Physique écrit en collaboration avec Infeld. La voici: " Sans la croyance qu'il est possible de saisir la réalité avec nos constructions théoriques, sans la croyance en l'harmonie interne de notre monde, il ne pourrait pas y avoir de science. Cette croyance est et restera toujours le motif fondamental de toute création scientifique. A travers tous nos efforts, dans chaque lutte dramatique entre les conceptions anciennes et les conceptions nouvelles, nous reconnaissons l'éternelle aspiration à comprendre, la croyance toujours ferme en l'harmonie de notre monde, continuellement raffermie par les obstacles qui s'opposent à notre compréhension". Tout y est : l'erreur de nous fier à notre expérience pour découvrir la réalité alors que celle ci ne peut être saisie que par une construction théorique (voir note 6); la lutte inévitable entre les conceptions anciennes et les conceptions nouvelles, lutte si traditionnelle qu'il la qualifie de dramatique; les obstacles qui s'opposent à notre compréhension et qui viennent non seulement de notre fausse perception des choses mais aussi de notre conservatisme obstiné; enfin et surtout l'impérieuse nécessité de faire confiance à l'harmonie de notre monde, ce fil d'Ariane qui ne nous a jamais fait défaut et auquel pourtant nous refusons perpétuellement de nous fier. Maintenant, comme dit l'expression populaire, il ne faut pas essayer de marcher plus vite que la musique. Un jour, pas forcément proche, (deux millénaires entre le pressentiment de l'héliocentrisme par les pythagoriciens, et la défense acharnée de Galilée !) nos autorités savantes réaliseront que la géométrie mérite elle aussi son écriture dédiée. Ils retrouveront alors l'écriture bivectorielle dont le support est la similitude car, comme Leibniz le pressentait, et comme on le sait maintenant il est impossible de passer outre pour la géométrie euclidienne ( voir note 7). Ensuite, de même que l'écriture introduite par Viète a rendu inacceptable l'absence des nombres négatifs (voir note 8), de même l'écriture bivectorielle rendra insupportable l'absence de la relation (u,v)=)v,-u(. Les portes de la Géométrie Euclidienne enfin complète s'ouvriront alors. Il suffit donc tout simplement d'attendre. Cagnes sur mer le 15 avril 2010 Notes: (1) - Dans une correspondance qu'il m'a adressée le 3 mars 2000, Monsieur Jean Pierre Demailly, académicien expert de la Géométrie Complexe, m'écrit " ...il y a isomorphisme entre classes d'équivalence des bivecteurs et nombres complexes non nuls avec votre loi d'addition des bivecteurs et la multiplication sur le groupe des complexes non nuls. Par conséquent la notion d'anoptrie est vide..." . Cette foi absolue dans la nécessité pour une vérité mathématique de pouvoir se traduire par les nombres que nous connaissons se retrouve chez tous mes correspondants. (2) - Les exemples donnés ici ne pouvaient effectivement pas se traduire avec les notations numériques alors connues mais par contre ils étaient suffisamment élémentaires pour être visualisables: l'irrationnalié apparaissait de fait dans la diagonale du carré unitaire, les nombres négatifs dans la nécessité de donner une abscisse à tous les points de la droite, et une simple projection rendait "visible" l'intersection de deux droites parallèles. L'anoptrie n'a plus cette élémentarité et par suite ne bénéficie d'aucun apport intuitif. Son seul argument est l'harmonie avec laquelle elle s'intègre aux trois autres relations, cette harmonie qu'Einstein demande constamment de prendre comme principe directeur mais qui laisse de marbre les autres scientifiques. (3) - Ce mythe célèbre de Platon débute le Livre VII de La République. Il y décrit l'humanité confinée dans une caverne qu'elle considère comme le véritable univers. En ne tenant pour vrai que ce que nos nombres nous rendent visible nous faisons penser aux savants de cette caverne qui n'y tiennent pour vrai que les ombres visibles sur les parois et pour lesquels la science consiste à avoir ".. la vue la plus fine pour saisir le passage des ombres contre la paroi, le plus de capacité pour tirer de ces observations des conjectures sur ce qui doit arriver.." . (4) - L'indifférence de Monsieur Connes est la plus surprenante car dans une interview qu'il donna au journaliste Olivier Postel Vinay pour La Recherche, il déclare "Fondamentalement je pense qu'on ne peut pas du tout exclure la possibilité qu'en fin de compte les lois fondamentales soient incroyablement simples, bien plus simples que tout ce qu'on peut imaginer aujourd'hui" , et aussi "Je suis prèt à parier qu'on s'apercevra un jour que la réalité matérielle se situe en fait à l'intérieur de la réalité mathématique" justement deux particularités de l'anoptrie, son extrème simplicité et le fait qu'elle n'est pour le moment qu'une réalité mathématique. (5) - L'héliocentrisme avait été pressenti par les Pythagoriciens vers 600 avant notre ère et Plutarque au début de notre ère en parle longuement. Quant aux nombres négatifs plusieurs mathématiciens avaient commencé à les utiliser avant Descartes (voir note 8) (6) - Dans son livre Comment je vois le monde, Einstein affirme que, tout physicien qu'il soit, c'est par les mathématiques que nous découvrirons les concepts et les principes de l'univers: " Je suis convaincu que la construction exclusivement mathématique nous permet de trouver les concepts et les principes les reliant entre eux" et dans Conceptions Scientifiques il écrit " Nous constatons maintenant avec évidence combien sont dans l'erreur les théoriciens de la connaissance qui croient que la théorie vient par induction de l'expérience" (7) Dans son célèbre programme d'Erlangen Félix Klein écrit "Les propriétés géométriques sont caractérisées par leur invariance relativement aux transformations du groupe principal" sachant qu'il appelle groupe principal "les déplacements de l'espace, ses transformations avec similitude et celles par symétrie" c'est à dire les similitudes directes et indirectes dont les déplacements et les symétries ne sont que des cas particuliers. (8) En fait si on en juge par la Kleine Enzyklopädie der Mathématik publiée par l'Institut de Bibliographie de Leipzig [p33] " En Inde vers 700 après Jésus Christ les calculs avec les nombres négatifs étaient déjà complètement connus" et c'est effectivement le symbolisme introduit par Viète qui a rendu leur absence inacceptable. Addenda: Dans l'impossibilité d'accèder aux moyens de diffusion classiques il ne me reste que le recours de déposer un pli cacheté à l'Académie des Sciences, que je motiverai en signalant l'indifférence de la communauté mathématique. Conformément aux statuts ce pli ne sera ouvert que dans cent ans. Mais il n'est même pas sûr que ce délai soit suffisant quand on réalise que pour les nombres négatifs, beaucoup moins révolutionnaires, et malgré le grand nom de Descartes, ils étaient encore refusés par Carnot 170 ans après.


- de noter (AB,AC) la similitude directe qui fait passer du vecteur AB au vecteur AC,
- de noter )AB,AC( la similitude indirecte qui fait passer du vecteur AB au vecteur AC.
On sait que ces deux similitudes ont le même rapport. Elles ne diffèrent que par leur angle qui est celui de AB avec AC pour la première et celui de AC avec AB pour la seconde.


de la
Géométrie Euclidienne

- Un triangle ABC où les vecteurs AB et AC sont isométriques s'appelle triangle isocèle de sommet A.
- Un triangle ABC où les vecteurs AB et AC sont orthogonaux s'appelle un triangle rectangle de sommet A.
- De même un triangle ABC où les vecteurs AB et AC seront anoptriques s'appellera triangle anoptrique ABC de sommet A.
et de même
(AB,AC)=)AC,BA( cad (BA+AC,BA)=)CA+BA, CA( cad (BC,BA)=)2 AI, AC(
d'où par addition
AC/AB = AB/AC cad AB² = AC ² cad AB = AC
" De nouveaux outils pour les démonstrations géométrique"
- C'était donc une erreur à la Renaissance de rejeter l'existence des nombres négatifs pour la raison qu'ils ne pouvaient pas mesurer des longueurs dont on croyait que c'était la mission obligatoire pour les nombres.
- Cela aurait été une erreur de refuser l'intersection des droites paralléles pour la raison qu'elle était impossible dans l'analytique de Descartes.
- Et pareillement je pense que c'est une erreur de la part de Messieurs Cartan ou Demailly pour ne citer qu'eux de refuser l'anoptrie pour la raison qu'elle ne peut pas s'interprèter avec les nombres que nous connaissons (voir note 2)
08:19 Publié dans La quatrième relation | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Merveilleux Pappus
|
Merveilleux Pappus
Introduction Depuis l'Antiquité les hommes pensent que la géomètrie est une science essentielle pour notre compréhension de l'univers, car dans cet univers les éléments géométriques abondent. En effet les corps célestes sont sphériques, les orbites sont elliptiques, les rayons lumineux non perturbés sont rectilignes, les galaxies ont souvent la forme de spirales, les déplacements des étoiles sur la voute céleste sont des cercles parfaits, et tout à l'avenant. De plus, autre mystère très étonnant de l'univers, la plupart des êtres vivants qui le peuplent ont une configuration presque parfaitement symétrique, en commençant par le plus important d'entre eux : l'homme. Le premier miracle de la Géométrie Aussi est il normal de penser que la progression de notre connaissance est conditionnée par celle que nous pouvons avoir en géomètrie et Platon, qui le pressentit , la mettait en tête de toutes les connaissances. Voilà pourquoi il écrivit au fronton de son Académie " Nul n'entre ici s'il n'est géomètre ". Plus tard la communion d'efforts des premiers chercheurs de ces temps reculés a été synthétisée par Euclide dans ses fameux Eléments. Il y a rappelé toutes les connaissances géomètriques de son temps. Mais surtout il a montré que cet ensemble prodigieux de résultats repose sur un tout petit nombre de principes qu'il a appelés des "axiomes". Et finalement , en dehors des considérations d'appartenance, d'ordre et de continuité, il apparaît que ces axiomes se ramènent exclusivement à trois relations: le parallélisme, l'isomètrie et l'orthogonalité. C'est à proprement parler un miracle, le premier miracle de la géométrie. Le second miracle de la Géomètrie. Puis un jour l'homme s'est aperçu que le parallelisme vient d'un cécité particulière de notre nature humaine, semblable à celle qui nous empêche par exemple de déceler les ultra violets dans les couleurs. Cette cécité géométrique nous empêche de voir une droite particulière du plan que nous avons appelée droite de l'infini. Dès que celle ci fut découverte, la distinction plane entre droites sécantes et droites parallèles tomba, et tout couple de droites eut désormais un point d'intersection. Ce fut une simplification considérable. Et il en fut de même avec l'orthogonalite. Elle cessa elle aussi d'avoir son statut particulier et les angles droits devinrent des angles comme les autres. La géométrie d'Euclide, avec tous ses axiomes, apparut dés lors comme un cas particulier de cette nouvelle géométrie beaucoup plus simple, qui prit le nom de Géométrie projective. Ce fut le second miracle de la géomètrie. Le troisième miracle de la Géométrie Cette géométrie regroupa de nombreux résultats qui avaient jusque là paru distincts. Parmi les théorèmes qui échappèrent à ce regroupement émergent deux thèorèmes fondamentaux qui portent le nom de Pappus et de Desargues lequel est aussi appelé: Théorème des triangles homologiques. Or un grand mathématicien, Federigo Enriques , écrivit dans un livre qui fait référence "Leçons de Géomètrie Projective", qu' "en se servant du théorème des triangles homologiques ..on pourrait déduire tous les théorèmes de géomètrie projective plane ". (voir page 46 de son livre ) . Et quelques temps avant un autre grand mathématicien, David Hilbert avait montré que le Théorème de Desargues peut se déduire de celui de Pappus alors que le contraire n'est pas possible. Il résulte alors de ces deux observations que le seul théorème de Pappus est le générateur de tous les théorèmes de géomètrie projective plane et par suite de tous les théorèmes de géométrie euclidienne puisque celle ci est contenue dans la géométrie projective, et nous avons vu par exemple qu'il démontre effectivement la belle propriété del'hexagramme mystique de Pascal, à la base de tout le contenu de ce site. C'est le troisième miracle de la géomètrie. Voilà la raison qui fait du théorème de Pappus un théorème tout à fait exceptionnel. ________________________________
Présentation du Théorème de Pappus. C'est à la Proposition 139 du Livre VII de son oeuvre: La Collection Mathématique, que le mathématicien Pappus, dans les premiers siècles de notre ère, énonce le théorème qui porte désormais son nom. Depuis cet exposé, il y a bien longtemps, la figure traditionnellement attachée à ce théorème est la suivante.
et l'énoncé du Thèorème de Pappus est alors: Si les points A',B',C' sont alignés, de même que A",B",C" alors il en est de même de A,B,C On voit comme ce thèorème est d'une grande élégance car il minimalise les hypothèses nécessaires, et il ne fait intervenir que des alignements de points. Mais il est dommage que nous lui conservions encore dans sa représentation graphique la disposition qui fut adoptée par Pappus à l'origine. En effet cette disposition suggère ce que l'on pourrait appeler une symétrie binaire avec une figure en quelques sorte symétrique autour de ABC qui semble jouer un rôle privilégié. Or en fait la particularité du Théorème de Pappus est une symétrie ternaire, où la droite ABC ne joue pas un rôle différent de celui des deux autres droites A'B'C' et A"B"C", et où les neuf droites de la figure n'ont pas la répartition 3+2+2+2 , suggérée par la représentation ci dessus ( les trois droites en gras, et leurs six liaisons) mais la répartition bien plus symétrique 3+3+3 de la figure ci dessous, où les notations sont absolument les mêmes que dans la première figure et où seule la disposition adoptée est différente.
La différence est que dans cette représentation on voit très bien la symétrie ternaire. On peut alors dire: - des trois alignements de points ABC, A'B'C', A"B"C", deux d'entre eux impliquent le troisième, défini sans ambiguïté par les deux premiers. mais on peut dire aussi - des trois convergences de droites abc, a'b'c', a"b"c", deux d'entre elles impliquent la troisième, définie sans ambiguïté par les deux premières .
Les deux Thèrèmes de Pappus On obtient alors deux théorèmes que les Géomètres appellent duaux l'un de l'autre . Donnons leur énoncés en convenant par exemple d'appeler droite PQ la droite qui passerait par les deux points P et Q, et d'appeler point pq le point qui serait l'intersection des deux droites p et q. Théorème 1: Soient B,B',B",C,C',C" six points d'un plan. Si les droites B'C', BC" et B"C sont concourantes, de même que les droites B"C", B'C et BC' alors les droites BC, B"C' et B'C" sont aussi concourantes. Théorème 2: Soient b,b',b",c,c',c" six droites d'un plan. Si les points b'c', bc" et b"c sont alignés, de même que les points b"c",b'c et bc' alors les points bc,b"c' et b'c" sont aussi alignés. ce dernier théorème est justement le Théorème de Pappus ou non seulement A,B,C sont présentés comme des intersections de droites mais aussi A',B',C' et A",B",C" ce qui rétablit les rôles symétriques de ces trois alignements. passons ensuite à sa démonstration |


|
Desargues par Pappus Maintenant que nous connaissons le Théorème de Pappus, utilisons le par exemple pour démontrer le Théorème de Desargues, puisque d'après D Hilbert c'est possible, alors que le contraire ne l'est pas. La figure est dessinée ci dessous et on y a coloré en jaune les deux triangles particuliers qui donnent aussi l'appellation de Triangles homologiques à ce théorème.
La démonstration de Desargues , donnée autrefois par Hilbert, se fait alors en appliquant trois fois Pappus:
|




|
Interprétation spatiale de Desargues Il est bien regrettable que le théorème fondamental ne soit pas celui de Desargues car son interprétation spatiale est très simple. En effet il est tout simplement la projection plane de la figure constituée par cinq plans quelconques de l'espace (au sens projectif bien entendu, c'est à dire sans possibilité de parallélismes)
Si on appelle O le point d'intersection de trois quelconques d'entre eux, alors les deux autres se coupent suivant une droite d, et ces deux plans coupent les trois premiers suivant deux triangles ABC et A'B'C' qui sont dits homologiques, et dont les cotés correspondants se coupent évidemment sur la droite d, c'est à dire sont alignés, ce qui constitue justement l'information apportée par le théorème de Desargues. On réalise l'intérèt qu'il y aurait à avoir une interprétation semblable pour le Théorème de Pappus dont la démonstration serait ainsi libérée de tout théorème plan "antérieur", comme le Théorème de Ménélaüs qui est généralement utilisé. A défaut d'avoir trouvé cette démonstration dans les ouvrages mathématiques que j'ai consultés, en voici une de mon cru, que je remplacerai volontiers par toute autre meilleure qui me sera proposée.
Interprétation spatiale de Pappus Soient dans l'espace trois droites d,d',d" dont aucune n'est coplanaire avec une autre.
Soit M1 un point de d. La droite d1d'intersection des plans P(M1,d') et P(M1,d"), existe toujours par hypothèse et rencontre par construction les trois droites d,d',d". Soient M1,M1',M1" ces points de rencontre. Soit M2 un autre point de d, et d2 la droite pareillement construite qui rencontre les trois droites d,d',d". Soient M2,M2' ,M2" ces points de rencontre. Quels que soient M1 et M2 les droites d1 et d2 ne sont jamais sécantes sinon les points M1,M1',M1",M2,M2',M2" seraient coplanaires c'est à dire aussi les droites d,d',d" ce qui est contraire à l'hypothèse. Soit M3 un autre point de d, et d3 la droite pareillement construite qui rencontre les trois droites d,d',d". Soient M3,M3' ,M3" ces points de rencontre.
Considérons alors la projection plane de ces points M à partir d'un centre de projection O pour le moment arbitraire. Dans cette projection plane les droites concourantes M1M3',M1"M2',M2M3" continuent à concourir au point que nous avons appelé I. Ensuite choisissons pour O un point situé sur une droite OJ du réseau R1 . Cette droite rencontre donc d,d',d", c'est à dire que vues de O ces trois droites, à savoir M1M2, M2'M3',M1"M3" sont vues concourantes en J. Mais alors l'appartenance de O à une droite du réseau R1 implique que O est situé sur (S) et donc que par O il passe aussi une droite du réseau R2, c'est à dire une droite OK qui rencontre d1,d2,d3. Par suite il en résulte qu'on voit aussi , à partir de O, ces trois droites ,à savoir M1M1",M2M2',M3'M3" concourir en K. Comme nous l'avons vu en commençant, ces deux convergences de droites qui en impliquent une troisième sont une des formes du Théorème de Pappus, ce que nous voulions justement démontrer. Quant à la figure d'accompagnement, avec ses neuf droites, on choisira à son gré, selon la remarque faite au début de cette page, l'une des deux suivantes:
Conclusion
Source : http://hexamys.free.fr/pappus.htm |





08:12 Publié dans Merveilleux Pappus | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Théorème de Pappus
Théorème de Pappus
Sommaire[masquer] |
Introduction [modifier]
Le théorème de Pappus est un résultat de géométrie présentant deux particularités :
D'abord, parmi tous les théorèmes de géométrie, c'est celui qui demande les hypothèses minimales. Il porte sur deux triplets de points arbitraires respectivement pris sur deux droites coplanaires quelconques. Il ne demande donc comme connaissance que celle de l'alignement de trois points et ne nécessite par exemple ni métrique, ni orthogonalité… On dit qu'il est un théorème de géométrie projective.
Ensuite, ce théorème est le générateur de tous les théorèmes de géométrie euclidienne par l'enchaînement suivant
- D'après un résultat obtenu par D. Hilbert, le théorème de Pappus permet de démontrer le théorème des triangles homologiques.
- Dans Leçons de géométrie projective du célèbre géomètre F. Enriqués, on lit : …en se servant du théorème des triangles homologiques […] on pourrait déduire tous les théorèmes de géométrie projective plane. (voir page 46 de son livre)
- Enfin la géométrie projective contient la géométrie euclidienne comme cas particulier.
On trouvera tous les détails sur ces développements dans les références données en fin d'article. Cette particularité remarquable explique que certains auteurs aient conféré le statut d'axiome à ce théorème, voir axiomes de plans projectifs.
Énoncé du théorème [modifier]

Dans un plan, soient A1, B1, C1 trois points distincts alignés sur une droite (d) , et soient A2, B2, C2 trois autres points distincts alignés sur une autre droite  alors les points
alors les points
- A intersection de (B2C1) avec (C2B1)
- B intersection de (A2C1) avec (C2A1)
- C intersection de (A2B1) avec (B2A1)
sont alignés.
Il s'agit d'un théorème de géométrie projective donc les points considérés peuvent être propres ou impropres. Dans le cas où tous les points sont propres, on obtient une configuration du type ci-contre.
Remarques :
si l'on note (Δ) la droite portant les points A,B,C alors les assertions suivantes sont équivalentes (en géométrie projective) :
-- les trois droites (d), et (Δ) sont concourantes ;
-- les trois droites (A1A2) (B1B2) (C1C2) sont concourantes ;
-- les six droites « croisillons » (B2C1) (C2B1) (A2C1) (C2A1) (A2B1) (B2A1) sont tangentes à une même conique.
-- Les deux droites (d) et peuvent être considérées comme une conique dégénérée : pour l'hexagramme A1B2C1A2B1C2, le théorème de Pappus-Pascal affirme l'alignement des points A, B et C.
Démonstration à l'aide des applications projectives [modifier]

On construit les points O intersection de (d) et (d'), D intersection de (A1B2) et (A2C1) et E intersection de (A1C2) et (C1B2)
On considère la projection centrale p de la droite (A1B2) sur la droite (d) de centre A2
- A1 a pour image A1
- C a pour image B1
- D a pour image C1
- B2 a pour image O
On considère la projection centrale q de la droite (d) sur la droite (B2C1) de centre C2
- A1 a pour image E
- B1 a pour image A
- C1 pour image C1
- O a pour image B2
Par l'application projective q o p de la droite (A1B2) sur la droite (B2C1)
- A1 a pour image E
- C a pour image A
- D a pour image C1
- B2 a pour image B2
Si on regarde maintenant la projection centrale r de la droite (A1B2) sur la droite (B2C1) de centre B
- A1 a pour image E
- D a pour image C1
- B2 a pour image B2
Or, une application projective d'une droite sur une autre est entièrement déterminée par l'image de trois points distincts. Les transformations q o p et r coïncident sur A1, D et B2. Elles sont donc égales et r(C) = A. Les points A, B et C sont donc alignés.
Démonstration à l'aide du théorème de Ménélaüs [modifier]

Dans le cas où aucun point n'est impropre et à condition qu'il existe un triangle de référence, dont les côtés soient interceptés par cinq droites du problème, on peut caractériser l'alignement de cinq triplets de points grâce au théorème de Ménélaüs et en déduire simplement que les trois points A, Bet C sont alignés. Deux triangles de référence peuvent être choisis à cette fin :
- le triangle J1K1L1 (en bleu sur la figure) dont les sommets sont les intersections des droites (A2B1), (B2C1) et (A1C2),
- le triangle J2K2L2 (en rouge sur la figure) dont les sommets sont les intersections des droites (A1B2), (B1C2) et (A2C1).
Dans le triangle J1K1L1 (s'il existe) :
- la droite (A1C1) intercepte les trois côtés en A1, B1, C1
- la droite (A2C2) intercepte les trois côtés en A2, B2, C2
- la droite (B1C2) intercepte les trois côtés en B1, A, C2
- la droite (A2C1) intercepte les trois côtés en A2, B, C1
- la droite (A1B2) intercepte les trois côtés en A1, C, B2
D'après Ménélaüs, ces alignements se traduisent par les égalités suivantes :


En multipliant membre à membre ces cinq égalités, il reste après simplification :
ce qui prouve d'après la réciproque de Ménélaüs l'alignement des trois points A, B et C.
Une démonstration analogue peut être faite dans le triangle J2K2L2. Dans ce cas, les trois droites (B1C2), (A2C1) et (A1B2) (en rouge sur la figure) échangent leur rôle avec les trois droites (B2C1), (A1C2) et (A2B1) (en bleu sur la figure). Cette fois-ci, les trois premières droites délimitent le triangle de référence tandis que les trois dernières interceptent les côtés du triangle de référence. Les droites (A1C1) et (A2C2) (en vert sur la figure) sont conservées pour intercepter le triangle.
Il existe un moyen pratique de trouver les deux triangles de référence. On peut représenter la ligne brisée A1, B2, C1, A2, B1 et C2 sous la forme d'un circuit hexagonal. Les côtés opposés de ce circuit hexagonal ont pour intersection les 3 points A, B, C et les deux triangles de référence sont les deux triangles bâtis sur l'hexagone.

On peut illustrer sur une autre configuration, avec quelle facilité le circuit hexagonal permet de trouver les deux triangles de référence. Définissons cette fois-ci :
- A comme l'intersection de (A1B2) avec (C1C2)
- B comme l'intersection de (A1A2) avec (B1C2)
- C comme l'intersection de (C1A2) avec (B1B2)
Le circuit hexagonal est alors A1, A2, C1, C2, B1 et B2 et les deux triangles de référence sont alors :
- le triangle J1K1L1 (en bleu sur la figure) dont les sommets sont les intersections des droites (A1B2), (B1C2) et (A2C1),
- le triangle J2K2L2 (en rouge sur la figure) dont les sommets sont les intersections des droites (A2B1), (B2C1) et (A1C2).


Notions connexes [modifier]
- Le Théorème d'Hessenberg qui fait le lien entre le théorème de Pappus et le théorème de Desargues.
- Le théorème de Pappus-affine dans le plan affine.
- L'Hexagramme de Pascal dont la configuration de Pappus est une version dégénérée (la conique est une bidroite).
- Enfin il est indispensable de rappeler que la configuration de Pappus est un bel exemple de Dualité (géométrie projective).
Théorème ou axiome? [modifier]
Tout dépend dans quelle géométrie on se situe. Si on travaille dans un contexte de géométrie euclidienne, cette propriété n'est qu'un théorème découlant d'axiomes plus puissants.
En revanche, dans un contexte de géométrie projective, si on travaille dans un plan projectif pappusien, c'est un de nos axiomes de construction de ce plan. Si on travaille dans un plan projectif homogène, c'est un théorème qui découle d'un autre ensemble d'axiomes.
Sources [modifier]
- Leçons de géométrie projective de F. Enriqués
- Petite encyclopédie de mathématiques Ed. Didier
- Enfin un site où sont donnés de nombreux développements sur le Thèorème de Pappus:Merveilleux Pappus
08:11 Publié dans Théorème de Pappus | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Prix Abel
Le prix Abel est une récompense décernée annuellement à des mathématiciens par l'Académie norvégienne des sciences et des lettres.Prix Abel
![]() Pour les articles homonymes, voir Abel (homonymie).
Pour les articles homonymes, voir Abel (homonymie).
Sommaire[masquer] |
En 2001, le gouvernement norvégien a annoncé qu'à l'occasion du bicentenaire de la naissance du mathématicien norvégien Niels Henrik Abel (1802) serait créé un nouveau prix pour les mathématiciens. Ce prix est inspiré du prix Nobel, qui n'existe pas en mathématiques. Même si la médaille Fields a souvent été comparée au prix Nobel, elle en diffère sur certains aspects essentiels (elle distingue des travaux exceptionnels accomplis par un mathématicien avant l'âge de 40 ans ; récompense financière modeste), ce qui fait du prix Abel un meilleur équivalent du prix Nobel (récompense plutôt d'une œuvre dans son ensemble)1. Le prix est décerné par l'Académie norvégienne des sciences et des lettres. Le comité de sélection est composé de cinq mathématiciens internationaux. Le prix est décerné en novembre par le Roi de Norvège et vaut 6 millions de couronnes norvégiennes, c'est-à-dire environ 730 000 euros. La Norvège a donné pour le prix une dotation initiale de 200 millions decouronnes norvégiennes (environ 25 millions d'euros). (en) Site officielCréation [modifier]
Le prix [modifier]
Liste des lauréats [modifier]
![]() France, Collège de France)
France, Collège de France)
![]() Royaume-Uni, Université d'Édimbourg) et Isadore Singer (
Royaume-Uni, Université d'Édimbourg) et Isadore Singer (![]() États-Unis, MIT)
États-Unis, MIT)
![]() Hongrie /
Hongrie / ![]() États-Unis, Courant Institute of Mathematical Sciences de New York)
États-Unis, Courant Institute of Mathematical Sciences de New York)
![]() Suède, Institut royal de technologie de Stockholm)
Suède, Institut royal de technologie de Stockholm)
![]() Inde /
Inde / ![]() États-Unis, National Academy of Sciences)
États-Unis, National Academy of Sciences)
![]() Belgique /
Belgique / ![]() France, Collège de France) et John Griggs Thompson (
France, Collège de France) et John Griggs Thompson (![]() États-Unis, Université de Floride)
États-Unis, Université de Floride)
![]() Russie /
Russie / ![]() France, Institut des hautes études scientifiques)
France, Institut des hautes études scientifiques)
![]() États-Unis, Université du Texas)
États-Unis, Université du Texas)Notes et références [modifier]
Lien externe [modifier]
| Lauréats du prix Abel | |
|---|---|
| Serre (2003) · Atiyah et Singer (2004) · Lax (2005) · Carleson (2006) · Varadhan (2007) · Tits et Thompson (2008) · Gromov (2009) · Tate (2010) | |
07:55 Publié dans Prix Abel | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Louis-François Benoiston de Châteauneuf
Louis-François Benoiston de Châteauneuf, né à le 22 mars 1776 à Paris où il est mort le 2 mai 1856, est un économiste, statisticien et démographe français, également historien et homme de lettres.Louis-François Benoiston de Châteauneuf
Sommaire[masquer] |
Après des études à l'École de médecine et au Val-de-Grâce, il effectue plusieurs campagnes en tant que chirurgien militaire. De retour à Paris en 1810, il obtient un poste administratif au ministère des Finances, ce qui lui permet de se consacrer à des travaux historiques et littéraires. Guidé par le mathématicien Siméon Denis Poisson, il entreprend en même temps les premières recherches statistiques auxquelles il doit sa réputation. Il se lie avec Louis René Villermé, avec qui il est chargé d'une mission d'étude en 1832. L'année suivante, les deux hommes sont élus membres de l'Académie des sciences morales et politiques. En 1835 et 1837, l'Académie confie à Benoiston de Châteauneuf deux enquêtes d'observation sur l'état économique et moral de la population. Les résultats en sont compilés sous forme de mémoires et de communications mais ne sont pas plus amplement diffusés en cette époque où lascience statistique en est encore à ses premiers essors. Balzac, qui mentionne Benoiston de Châteauneuf à deux reprises dans sa Comédie humaine, a parlé de lui comme « l'un des plus courageux savants qui se soient voués aux arides et utiles recherches de la statistique1 ». Biographie [modifier]
Publications [modifier]
Notes et références [modifier]
Source biographique [modifier]
07:54 Publié dans Louis-François Benoiston de Châteauneuf | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Théorème de Bayes
Le théorème de Bayes est un résultat de base en théorie des probabilités, issu des travaux du révérend Thomas Bayes et retrouvé ensuite indépendamment par Laplace. Dans son unique article, Bayes cherchait à déterminer ce que l’on appellerait actuellement la distribution a posteriori de la probabilité p d’une loi binomiale. Ses travaux ont été édités et présentés à titre posthume (1763) par son ami Richard Price dans Un essai pour résoudre un problème dans la théorie des risques (An Essay towards solving a Problem in the Doctrine of Chances). Les résultats de Bayes ont été repris et étendus par le mathématicien français Laplace dans un essai de 1774, lequel n’était apparemment pas au fait du travail de Bayes. Le résultat principal (la Proposition 9 de l’essai) obtenu par Bayes est le suivant : en considérant une distribution uniforme du paramètre binomial p et une observation m d'une loi binomiale Ses résultats préliminaires, en particulier les propositions 3, 4 et 5 impliquent le résultat que l’on appelle théorème de Bayes (énoncé plus bas) mais il ne semble pas que Bayes se soit concentré ou ait insisté sur ce résultat. Ce qui est « bayésien » (au sens actuel du mot) dans la Proposition 9, c’est que Bayes ait présenté cela comme une probabilité sur le paramètre p. Cela revient à dire qu’on peut déterminer, non seulement des probabilités à partir d’observations des issues d’une expérience, mais aussi les paramètres relatifs à ces probabilités. C’est le même type de calcul analytique qui permet de déterminer par inférence les deux. En revanche, si l’on en croit une interprétation fréquentiste, il ne peut pas exister de probabilité de distribution du paramètre pet par conséquent, on ne peut raisonner sur p qu’avec un raisonnement d’inférence non-probabiliste.Théorème de Bayes
 , où m est donc le nombre d’issues positives observées et n le nombre d’échecs observés, la probabilité que p soit entre a et b sachant m vaut :
, où m est donc le nombre d’issues positives observées et n le nombre d’échecs observés, la probabilité que p soit entre a et b sachant m vaut :
Sommaire[masquer] |
Le théorème de Bayes est utilisé dans l’inférence statistique pour mettre à jour ou actualiser les estimations d’une probabilité ou d’un paramètre quelconque, à partir des observations et des lois de probabilité de ces observations. Il y a une version discrète et une version continue du théorème. En théorie des probabilités, le théorème de Bayes énonce des probabilités conditionnelles : étant donné deux évènements A et B, le théorème de Bayes permet de déterminer la probabilité de A sachant B, si l’on connaît les probabilités : Ce théorème élémentaire (originellement nommé « de probabilité des causes ») a des applications considérables. Pour aboutir au théorème de Bayes, on part d’une des définitions de la probabilité conditionnelle : en notant soit le théorème de Bayes. Chaque terme du théorème de Bayes a une dénomination usuelle. Le terme P(A) est la probabilité a priori de A. Elle est « antérieure » au sens qu’elle précède toute information sur B. P(A) est aussi appelée la probabilité marginale de A. Le termeP(A|B) est appelée la probabilité a posteriori de A sachant B (ou encore de A sous condition B) . Elle est « postérieure », au sens qu’elle dépend directement de B. Le terme P(B|A), pour un B connu, est appelé la fonction de vraisemblance de A. De même, le terme P(B) est appelé la probabilité marginale ou a priori de B. On améliore parfois le théorème de Bayes en remarquant que afin de réécrire le théorème ainsi : où AC est le complémentaire de A. Plus généralement, si {Ai} est une partition de l’ensemble des possibles, pour tout Ai de la partition. Voyez aussi le théorème des probabilités totales. I. J. Good reprend une idée d’Alan Turing : les probabilités deviennent plus faciles à manier si au lieu de raisonner sur une probabilité p, on travaille sur une quantité construite de la façon suivante : Ev(p) = ln (p/(1-p)) ou Ev(p) = log (p/(1-p)) qu’il nomme weight of evidence, terme auquel on peut donner différentes traductions : « poids de témoignage », « valeur de plausibilité », etc. Ce qui est intéressant à en retenir est ceci : En calculs de fiabilité, où il faut manier des probabilités très grandes (1-ε) et très petites (ε), travailler en termes d’evidences permet une visualisation bien plus claire des classes de sécurité : une évidence de -70 dB correspond à une probabilité de 10-7, etc. On peut également travailler en gardant en toutes circonstances le même nombre de décimales et sans manipuler d’exposants, ce qui améliore la lisibilité des calculs. Il existe aussi une version du théorème pour les distributions continues, qui se déduit simplement de la densité jointe des observations et des paramètres, produit de la vraisemblance par la densité a priori sur les paramètres, par application de la définition des lois et des densités conditionnelles. La forme continue du théorème de Bayes peut aussi s'interpréter comme indiquant que la distribution a posteriori s’obtient en multipliant la distribution a priori, par la vraisemblance, et en effectuant une normalisation (du fait qu'il s'agit d'une densité de probabilité). En calcul bayésien, on prend donc l'habitude de travailler avec des signes de proportionnalité plutôt que des égalités pour diminuer la complexité des expressions puisque les constantes manquantes se retrouvent par intégration (en principe). Les techniques de simulation de type Monte Carloet MCMC n'utilisent d'ailleurs pas ces constantes de normalisation. L’exemple le plus connu est le suivant : si l’on observe K numéros de séries d’appareils, que le plus grand est S, et qu’on les suppose numérotés à partir de 1, quelle est la meilleure estimation du nombre N d’appareils existants ? On démontre[réf. nécessaire] que le meilleur estimateur simple est N = S.(K − 1) / (K − 2), et surtout que la précision de cette estimation croît très vite, même avec de petites valeurs de K. Autre exemple possible : supposons qu’une proportion p inconnue d’électeurs vote « oui » avec p ∈ [0,1]. On tire de la population un échantillon de n électeurs parmi lesquels un nombre x a voté « oui ». La fonction de vraisemblance vaut donc : En multipliant cela par la fonction de densité de probabilité a priori de p et en normalisant, on calcule la distribution de probabilité a posteriori de p, ce qui injecte l'information des nouvelles données du sondage. Ainsi, si la probabilité a priori de p est uniforme sur l'intervalle [0,1], alors la probabilité a posteriori aura la forme d'unefonction bêta. la constante étant différente de celle de la fonction de vraisemblance. La fonction bêta se retrouve avec une grande régularité dans ces questions d’estimation. Le calcul de la variation d’entropie entre l’ancienne et la nouvelle distribution permet de quantifier exactement, en bits, l’information obtenue. Les règles de la théorie mathématique des probabilités s’appliquent à des probabilités en tant que telles, pas uniquement à leur application en tant que fréquences relatives d’évènements aléatoires. On peut décider de les appliquer à des degrés de croyance en certaines propositions. Ces degrés de croyance s’affinent au regard d’expériences en appliquant le théorème de Bayes. Le Théorème de Cox-Jaynes justifie aujourd’hui très bien cette approche, qui n’eut longtemps que des fondements intuitifs et empiriques. À titre d’exemple, imaginons deux urnes remplies de boules. La première contient dix (10) boules noires et trente (30) blanches ; la seconde en a vingt (20) de chaque. On tire sans préférence particulière une des urnes au hasard et dans cette urne, on tire une boule au hasard. La boule est blanche. Quelle est la probabilité qu'on ait tiré cette boule dans la première urne sachant qu'elle est blanche? Intuitivement, on comprend bien qu'il est plus probable que cette boule provienne de la première urne, que de la seconde. Donc, cette probabilité devrait être supérieure à 50 %. La réponse exacte vient du théorème de Bayes. Soit H1 l’hypothèse « On tire dans la première urne. » et H2 l’hypothèse « On tire dans la seconde urne. ». Comme on tire sans préférence particulière, P(H1) = P(H2) ; de plus, comme on a certainement tiré dans une des deux urnes, la somme des deux probabilités vaut 1 : chacune vaut 50 %. Notons 'D' l’information donnée « On tire une boule blanche. » Comme on tire une boule au hasard dans une des urnes, la probabilité de D sachant/sous l’hypothèse H1 vaut : De même si l’on considère H2, La formule de Bayes dans le cas discret nous donne donc. Avant que l’on regarde la couleur de la boule, la probabilité d’avoir choisi la première urne est une probabilité a-priori, P(H1) soit 50 %. Après avoir regardé la boule, on révise notre jugement et on considère P(H1|D), soit 60 %, ce qui confirme notre intuition première. Qui croire, et avec quelle probabilité? Cette approche bayésienne est utilisée par les centres anti-poison pour détecter le plus vite possible et avec le maximum de précision le type d’empoisonnement dont souffre probablement un patient. Un problème régulièrement soulevé par l’approche bayésienne est le suivant : si une probabilité de comportement (délinquance, par exemple) est fortement dépendante de certains facteurs sociaux, culturels ou héréditaires, alors : Les faux positifs sont une difficulté inhérente à tous les tests : aucun test n’est parfait. Parfois, le résultat sera positif à tort, ce que l’on nomme parfois risque du premier ordre ou risque alpha. Par exemple, quand on teste une personne pour savoir si elle est infectée par une maladie, il y a un risque généralement infime que le résultat soit positif alors que le patient n’a pas contracté la maladie. Le problème alors n’est pas de mesurer ce risque dans l’absolu (avant de procéder au test), il faut encore déterminer la probabilité qu’un test positif le soit à tort. Nous allons montrer comment, dans le cas d’une maladie très rare, le même test par ailleurs très fiable peut aboutir à une nette majorité de positifs illégitimes. Imaginons un test extrêmement fiable : Imaginons que la maladie ne touche qu’une personne sur mille, soit avec une probabilité 0,001. Cela peut paraître peu mais dans le cas d’une maladie mortelle, c’est considérable. Nous avons toutes les informations nécessaires pour déterminer la probabilité qu’un test soit positif à tort, ce qui peut causer un surdiagnostic. Désignons par A l’évènement « Le patient a contracté la maladie » et par B l’évènement « Le test est positif ». La seconde forme du théorème de Bayes dans le cas discret donne alors : Sachant que le test est positif, la probabilité que le patient soit sain vaut donc environ : (1 − 0,019) = 0,981. Du fait du très petit nombre de malades, Si le traitement est très lourd, coûteux ou dangereux pour un patient sain, il peut être alors opportun de faire subir à tous les patients positifs un test complémentaire (qui sera sans doute plus précis et plus coûteux, le premier test n’ayant servi qu’à écarter les cas les plus évidents). On a tout de même réussi avec le premier test à isoler une population vingt fois moindre qui contient pratiquement tous les malades. En procédant à d’autres tests, on peut espérer améliorer la fiabilité du test. Le théorème de Bayes nous montre que dans le cas d’une probabilité faible de la maladie recherchée, le risque d’être déclaré positif à tort a un impact très fort sur la fiabilité. Le dépistage d'une maladie rare telle que le cancer peut causer le surdiagnostic.Le théorème de Bayes en Statistique [modifier]

 la probabilité que A et B aient tous les deux lieu. En divisant de part et d’autre par P(B), on obtient :
la probabilité que A et B aient tous les deux lieu. En divisant de part et d’autre par P(B), on obtient :
Autres écritures du théorème de Bayes [modifier]



La démarche d’I. J. Good [modifier]
Théorème de Bayes pour des densités de probabilité [modifier]


Inférence bayésienne [modifier]
Exemples [modifier]
De quelle urne vient la boule ? [modifier]


Pronostics contradictoires [modifier]
Aspects sociaux, juridiques et politiques [modifier]
« Faux positifs » médicaux [modifier]

Références [modifier]
Différentes versions de l’essai original, en anglais [modifier]
Commentaires en anglais [modifier]
Autres références [modifier]
Articles connexes [modifier]
07:53 Publié dans Théorème de Bayes | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Thomas Bayes
Thomas Bayes
| Thomas Bayes | |
|---|---|
| Naissance | vers 1702 Londres (Angleterre) |
| Décès | 17 avril 1761 Tunbridge Wells (Angleterre) |
| Domicile | Angleterre |
| Nationalité | |
| Champs | Mathématiques |
| Diplômé | Université d'Édimbourg |
| Célèbre pour | Théorème de Bayes |
| modifier |
|
Thomas Bayes (env. 1702, Londres - 17 avril 1761) est un mathématicien britannique et pasteur de l'Église presbytérienne, connu pour avoir formulé le théorème de Bayes. Ses découvertes en probabilités ont été résumées dans son Essais sur la manière de résoudre un problème dans la doctrine des risques (Essay Towards Solving a Problem in the Doctrine of Chances - 1763) publié à titre posthume dans les comptes-rendus de l'Académie royale de Londres (the Philosophical Transactions of the Royal Society of London). On lui connaît deux publications de son vivant : Né à Londres, il est mort à Tunbridge Wells, dans le Kent. Sa dépouille repose dans le cimetière de Bunhill Fields à Londres.
On lui doit en particulier une loi importante des probabilités, la règle de Bayes (posthume, 1763), très utilisée en classification automatique. Un exemple parmi d'autres est la lutte contre le pourriel, par la méthode dite d'inférence bayésienne.
Liens externes en anglais [modifier]
07:51 Publié dans Thomas Bayes | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
07/12/2010
Distributions dans le sillage de Laurent Schwartz Par Nicole Berline,Claude Sabbah
18:22 | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Problèmes choisis de mathématiques supérieures Par Hervé Gianella,R. Krust,F. Taieb,Nicolas Tosel
18:14 Publié dans Problèmes choisis de mathématiques supérieures | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Matlab: aide-mémoire Par Kermit Sigmon
18:12 Publié dans Matlab: aide-mémoire | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Programmer avec Maple V Par M. B. Monagan,Waterloo Maple Software Inc.,K. O. Geddes,K. M. Heal,G. Labahn,S. M. Vorkoetter
18:11 Publié dans Programmer avec Maple V | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
Sophus Lie: une pensée audacieuse Par Arild Stubhaug
18:10 | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook
LIVRE Essentials of mathematica

06:57 Publié dans LIVRE Essentials of mathematica, Livres | Lien permanent | Commentaires (0) | | del.icio.us | | Digg | Facebook