
























08/12/2010
Droite (mathématiques)
Droite (mathématiques)
![]() Pour les articles homonymes, voir Droite.
Pour les articles homonymes, voir Droite.
|
|
Cet article ou cette section concernant les mathématiques doit être recyclé.
Une réorganisation et une clarification du contenu est nécessaire. Discutez des points à améliorer en page de discussion.
|
Pour les Anciens, la droite, en mathématiques et surtout en géométrie, était un objet allant de soi, si évident que l'on négligeait de préciser de quoi l'on parlait. L'un des premiers à formaliser la notion de droite fut le Grec Euclide dans ses Éléments. Avec le développement du calcul algébrique et du calcul vectoriel, d'autres définitions vinrent s'ajouter. Mais c'est la naissance des géométries non euclidiennes qui a conduit à la découverte de nouveaux types de droites, et, par là-même, nous a forcés à éclaircir et approfondir ce concept.
Sommaire[masquer] |
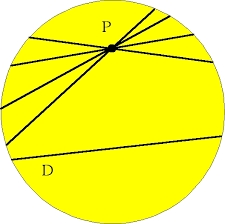
« La ligne droite est le plus court chemin pour aller d'un point à un autre »1. Cette définition simple suffit à certaines applications concrètes. Elle permet par exemple au jardinier de tracer ses lignes de semis : en tendant une corde entre deux piquets, il matérialise une ligne tirée au cordeau. Une autre image habituelle est celle du fil à plomb1. C'est-à-dire, dans les deux cas, un fil tendu dont on néglige l'épaisseur. Cette définition est celle d'un segment. Une droite, à la différence d'un segment, est illimitée des deux côtés. Différentes limitations de cette définition ont conduit les mathématiciens à lui en préférer d'autres. Par exemple, si on assimilie la Terre à une sphère, le chemin le plus court entre deux points n'est plus une ligne droite, mais un arc de cercle. Cependant, à l'échelle d'un être humain, ce cercle est si grand qu'une ligne droite en est une bonne approximation2. La notion de « chemin le plus court » est étudiée sous le nom de géodésique. Dans ses éléments, Euclide définit les objets relevant de la géométrie (point, droite, plan, angle) et leur affecte un certain nombre de propriétés (postulats). À l'aide de ces éléments de base, il essaie de construire, par des démonstrations rigoureuses, l'ensemble des autres propriétés. Pour Euclide : Il part d'une droite finie qu'il définit comme un segment. Il a besoin d'un postulat pour la prolonger au-delà de ses extrémités, d'un autre pour en prouver l'existence (Par deux points distincts passe une droite) et d'un autre appelé le cinquième postulat d'Euclide pour traiter des positions relatives des droites ( Si une droite coupe deux autres droites, de telle façon que la somme des angles intérieurs du même côté soit plus petite que deux droits, ces droites, prolongées à l'infini, se rencontreront du côté où les angles sont plus petits que deux droits.) dont plusieurs versions équivalentes peuvent être données. L'approche d'Euclide est féconde, elle permet de démontrer de nombreux théorèmes considérés comme élémentaires au regard des mathématiques au sens moderne du terme. On peut citer le théorème de Thalès, le théorème de Pythagore ou encore le problème de Napoléon. La définition axiomatique d'Euclide apparait trop pauvre pour résoudre plusieurs familles de problèmes. On peut citer historiquement ceux associés à la construction à la règle et au compas, par exemple la trisection de l'angle, la duplication du cube ou encore la construction d'un polygone régulier. Une approche algébrique est utilisée pour pallier cette faiblesse. À l'aide de la notion de polynôme cyclotomique, Gauss réalise une percée majeure dans ce domaine en 1801 qu'il publie dans son livre Disquisitiones arithmeticae. Les progrès de la physique engendrent une nouvelle branche des mathématiques, initialement appelée calcul infinitésimal et maintenant calcul différentiel. Elle obtient comme premier succès la compréhension de la mécanique céleste. Une fois encore, la modélisation d'Euclide est insuffisante pour formaliser convenablement ce domaine. Une nouvelle construction est alors proposée, elle se fonde sur des structures algébriques. Les groupes abéliens et les corps sont utilisées pour définir un espace vectoriel puis unespace affine. En géométrie vectorielle, une droite est un sous-espace vectoriel de dimension 1. On peut la nommer également droite vectorielle. Si v est un vecteur non nul, la droite vectorielle engendrée par v est l'ensemble des vecteurs w pour lesquels il existe un scalaire (un réel pour un espace vectoriel sur R) k tel que w = kv. On dit alors que les vecteurs v et w sont colinéaires. En géométrie affine, une droite est un sous-espace affine de dimension 1. Si A est un point et v un vecteur non nul, la droite affine engendrée par A et v est l'ensemble des points M pour lesquels il existe un scalaire k tel que On peut aussi définir la droite passant par les points distincts A et B comme l'ensemble des barycentres des points A et B. La notion de droite est alors largement généralisée. L'espace vectoriel peut être un ensemble fini comme pour les codes linéaires utilisés dans la théorie de l'information, ou enarithmétique. Une droite est alors elle aussi un ensemble fini de points. L'espace vectoriel peut être une extension de corps comme dans le cadre de la théorie de Galois, l'ensemble desnombres rationnels dans le corps des réels possède les propriétés géométrique d'une droite. En analyse, et particulièrement en analyse fonctionnelle une droite est un ensemble de fonctions. Par exemple les primitives d'une fonction continue réelle de la variable réelle forment une droite. L'approche algébrique permet d'enrichir très largement la géométrie et offre des réponses satisfaisantes à bon nombre de problèmes. En revanche une vielle conjecture reste ouverte : comment démontrer le cinquième postulat d'Euclide. Proclos l'exprime de la manière suivante: Dans un plan, par un point distinct d'une droite d, il existe une unique droite parallèle à d. Déjà, les grecs savaient qu'une sphère semble pouvoir définir une géométrie, les droites seraient alors les grands cercles de la sphère. En revanche, la connexion entre une sphère et la définition d'une géométrie reste à cette époque hors de portée. David Hilbert apporte un élément de réponse. La construction d'Euclide n'est pas entièrement rigoureuse. Il manque en effet, quinze axiomes pour bâtir les fondements d'un système logique à même de supporter la géométrie euclidienne. Une telle formalisation existe, on parle par exemple d'axiomes de Hilbert. La réponse à la question que pose le cinquième postulat est donc de l'ordre de la logique. La base axiomatique d'Euclide constituée des quatre premiers postulats est trop faible pour garantir le cinquième. Si l'approche de Hilbert permet de résoudre cette question, elle est peu opérationnelle pour bâtir la théorie de la géométrie euclidienne. On utilise en général la base axiomatique dePeano pour construire l'ensemble des entiers naturels puis les différentes structures algébriques utilisées. L'intérêt des travaux de Hilbert sur cette question est donc surtout de l'ordre de la logique et peu géométrique. Bien avant de comprendre la dimension logique de la problématique et dans le courant du XIXe, sont nées d'autres géométries dans lesquelles la droite n'avait plus les mêmes propriétés que dans la géométrie euclidienne : les géométries non euclidiennes. En géométrie projective, des droites parallèles se coupent en un point impropre et par deux points ne passe qu'une seule droite. En géométrie hyperbolique, par un point donné, non situé sur une droite donnée, il passe au moins deux droites qui ne coupent pas la droite donnée. En géométrie elliptique, deux droites sont toujours sécantes. Un exemple classique de géométrie elliptique est la géométrie sur une sphère où le plus court chemin pour aller d'un point à un autre est une partie d'un grand cercle. Une droite est alors définie comme un grand cercle. Deux droites distinctes se coupent alors en deux points diamétralement opposés qui n'en forment qu'un pour cette géométrie. On retrouve la propriété : par deux points distincts passe une seule droite. De plus on peut aussi définir une droite comme un cercle de rayon infini. Cette définition est incompatible avec celle issue de l'algèbre linéaire. Dans ce contexte, on parle en général de géodésique pour éviter une confusion. Si l'espace vectoriel est muni d'une base, ou l'espace affine d'un repère, la droite peut être caractérisée par des équations. Une droite affine est l'ensemble des points M de coordonnées (x ; y) tels que Dans cette famille de droites, on rencontre m représente la pente de la droite. En dimension n, la droite passant par Ce système d'équations s'appelle un système d'équations paramétrées de la droite. Cas particulier de l'espace (dimension 3), en :Point de vue concret [modifier]
L'approche d'Euclide [modifier]
Définition formelle [modifier]
Applications [modifier]
Approche algébrique [modifier]
Motivations [modifier]
Géométrie vectorielle [modifier]
Géométrie affine [modifier]
 . Le vecteur v est appelé vecteur directeur de la droite.
. Le vecteur v est appelé vecteur directeur de la droite.Applications [modifier]
Logique et géométrie [modifier]
Motivation [modifier]
Rôle de Hilbert [modifier]
Géométries non euclidiennes [modifier]
Géométrie analytique [modifier]
Espace affine de dimension 2 [modifier]
 , où
, où  . Un vecteur directeur de la droite est le vecteur de coordonnées ( − b;a). L'équation précédente est appelée équation cartésienne de la droite.
. Un vecteur directeur de la droite est le vecteur de coordonnées ( − b;a). L'équation précédente est appelée équation cartésienne de la droite.
Espace affine de dimension n [modifier]
 et de vecteur
et de vecteur  est l'ensemble des points
est l'ensemble des points  pour lesquels il existe un scalaire k tel que
pour lesquels il existe un scalaire k tel que
Annexes [modifier]
Articles connexes [modifier]
Bibliographie [modifier]
Notes et références [modifier]

08:20 Publié dans Droite (mathématiques) | Lien permanent | Commentaires (0) |  |
|  del.icio.us |
del.icio.us |  |
|  Digg |
Digg |  Facebook
Facebook
Les commentaires sont fermés.