
























08/01/2010
Entre figures et espaces : le cas des diagrammes en géométrie finie
Entre figures et espaces : le cas des diagrammes en géométrie finie

Le 12 novembre 2009, par Sébastien Gandon
Que représente une figure ? On cherche ici à montrer que la réponse à cette question n’est pas aussi simple qu’il y paraît. Nous sommes tous plus ou moins familiers avec les diagrammes de la géométrie classique, qui matérialisent une figure dans le plan ou dans l’espace. On sait peut-être moins que dans l’Antiquité, ces figures ... n’étaient dans rien. Ce n’est que bien plus tard, voici en gros un siècle, qu’on les a approchées comme partie d’un espace, espace vers lequel s’était déplacé une grande partie de l’effort mathématique. Ce qui est encore moins connu, c’est la manière dont des diagrammes semblables à ceux de la géométrie classique ont été utilisés, au début du XXe siècle, pour représenter ... des espaces. Il fallait pour cela que les mathématiciens s’intéressent aux géométries finies. Cet article est consacré à leur émergence et au rôle conceptuel qu’elles jouèrent dans l’histoire de la géométrie.
Introduction
EN histoire de la géométrie, on a souvent coutume d’opposer la géométrie qu’on dit « classique » —celle qui aurait été pratiquée depuis les Eléments d’Euclide jusqu’aux Fondements de la géométrie de Hilbert [1], publiés en 1899, et qui porte sur les propriétés des figures— à la géométrie dite « moderne » —celle qu’auraient inauguré les mêmes Fondements— et qui étudie les propriétés d’un espace. Dans cette perspective, les Éléments d’Euclide représentent le modèle d’une « géométrie des figures ». Certes, chez Euclide, les théorèmes sur le triangle, le cercle, etc. sont déduits, comme cela se passe chez Hilbert, à partir d’axiomes (les cinq « demandes » du livre I [2]). Mais on a mis en évidence depuis longtemps que les preuves euclidiennes comportaient des lacunes : certaines hypothèses, nécessaires dans les déductions, sont introduites par référence aux diagrammes et ne font l’objet ni d’axiomes, ni de propositions déduites de ces axiomes [3]. Les propriétés de l’espace dans lequel « vivent » et s’insèrent les figures étudiées ne sont ainsi complètement explicitées ni chez Euclide ni chez ses successeurs. En fait, cet « espace » n’est même abordé qu’indirectement, par le biais du fait que chaque figure peut être « enrichie » de diverses manières (les droites peuvent être prolongées, de nouveaux points introduits, etc.). Se permettre d’opérer de la sorte sur une figure, c’est dire qu’elle se trouve donc d’une certaine manière intrinsèquement liée à un « environnement », un plan par exemple. Mais Euclide n’élucide pas complètement les modalités de cette articulation. Ainsi, pour ne citer qu’un exemple, le simple fait que deux cercles « entrelacés » se coupent en deux points n’est prouvé nulle part !
C’est précisément sur ce point que la géométrie inaugurée par Hilbert se démarque des pratiques anciennes et c’est la raison pour laquelle on la qualifie de « moderne » : dans cette nouvelle manière de faire, la structure globale de l’espace est complètement donnée par un système d’axiomes. Tout ce qui peut être déduit des postulats est considéré comme un théorème, mais l’on s’interdit en revanche d’utiliser, dans les démonstrations, une information qui ne figurerait pas dans les axiomes ou qui ne pourrait pas être établie à partir d’eux. Hilbert a présenté dans les Fondements une liste de vingt postulats, répartis en cinq groupes [4], et l’ensemble des théorèmes de la géométrie d’Euclide s’en déduisent. À la différence des géomètres « classiques », au sens que nous avons introduit plus haut, Hilbert démontre ainsi, par exemple, le fait que deux cercles « entrelacés » se coupent en deux points. Ce trait trahit en fait une mutation fondamentale par rapport aux pratiques antérieures. Le géomètre hilbertien n’étudie plus tant les propriétés des figures qu’il ne s’intéresse à la structure des « modèles » du système axiomatique considéré. Un modèle, ici, c’est un ensemble d’objets (qu’on appelle « points », « droites ») et de relations (« être sur », « se couper », « être parallèle », etc.) qui satisfont tous les axiomes. Les points et les droites dans le plan, tels que les concevaient les mathématiciens grecs, obéissent à tous les postulats de Hilbert. Mais il en va de même des couples de nombres réels (l’interprétation de « points » dans la géométrie « cartésienne ») et des équations linéaires en
Dans cette nouvelle perspective, l’objet d’étude du géomètre n’est plus la figure ou ses propriétés, mais un espace. De plus, cet espace ne se présente pas comme ce « dans quoi » les figures étudiées se trouvent, c’est-à-dire comme un milieu toujours présent dont les propriétés resteraient à l’arrière-plan, mais comme un modèle abstrait d’un système axiomatique. Ces deux approches de la géométrie présentent des ressemblances (en un sens, Hilbert axiomatise bien la théorie d’Euclide), mais les différences entre elles sont essentielles. Les historiens des mathématiques parlent volontiers de la rupture hilbertienne. Pour reprendre une métaphore classique en histoire de la philosophie, on pourrait dire que les Fondements de la géométrie accomplissent une véritable révolution copernicienne : dans la géométrie classique, les propositions géométriques portent sur (tournent autour) des figures, considérées comme des objets s’insérant dans un espace donné antérieurement à la théorie ; dans la géométrie qui se situe dans la descendance de Hilbert, c’est l’inverse : le géomètre définit l’espace par un discours qui prend systématiquement la forme d’une axiomatique —le discours ici tourne autour de l’espace.
Mon propos dans ce qui suit n’est pas de remettre en cause la pertinence de l’opposition que je viens de décrire, mais de montrer que la division ne recoupe pas tout le champ des possibles. Plus précisément, je montrerai dans ce qui suit qu’il existe des cadres théoriques dans lesquels les mathématiciens ont utilisé des figures ou des diagrammes pour représenter des espaces —et, inversement, que dans ces contextes des espaces, définis axiomatiquement, ont pu être dessinés sur une feuille de papier. Ainsi, dans les géométries finies qui sont apparues au début du XXe siècle, les modèles des axiomatiques sont des figures, et les propriétés de ces figures expriment des caractéristiques de l’espace sous-jacent. Plutôt que de présenter un panorama chronologique de l’émergence de ces nouvelles géométries, je me servirai de la distinction entre figure et espace pour problématiser quelques étapes de cette histoire. Je donnerai tout d’abord quelques indications mathématiques préalables sur la notion de « configuration », qui a joué un rôle fondamental dans cette affaire. Je montrerai ensuite comment les géomètres du XIXe siècle en sont venus à distinguer deux notions de configuration : un concept « abstrait », combinatoire, d’une part, et un concept « concret », géométrique, de l’autre. Enfin, j’étudierai le début de l’article « Finite Projective Geometries » de Oswald Veblen (et de son collègue W. Bussey), véritable acte de naissance des géométries finies, pour montrer comment la substitution des espaces finis aux configurations nécessitent, pour être comprise, de remettre en question le caractère exclusif de la disjonction « figure versus espace ».
1- Préalable mathématique
Avant de définir le concept clé de configuration, donnons quelques indications sur la façon dont les mathématiciens définissent aujourd’hui la notion de structure d’incidence. Soit  B
B ABC
ABC 12)
12)
Tous les tableaux à double entrée de ce type correspondent à une structure d’incidence possible définie sur ABC12

- Figure 1.

J’ai mis ci-dessus « points » et « droites » entre guillemets pour manifester le fait que les éléments de bk)
- (i) il y a au plus une « droite » passant par deux « points » quelconques ;
- (ii) il y a
k « points » sur chaque « droite » etr « droites » sur chaque « point ». [5]
La structure
En revanche, la structure d’incidence qui comporte 4 « points » (ABCD 123456 62) 4 3 2 6
4 3 2 6 
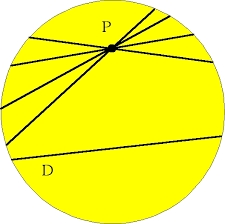
Comme nous venons de le voir, les éléments distingués —les « points » et les « droites »— ne sont pas ici, malgré leur nom, des objets géométriques. Le diagramme précédent est un tableau à double entrée, et il peut recevoir toutes les interprétations qu’une telle structure de données est habituellement susceptible de recevoir. Mais il se trouve ici, à la différence de ce qui se passait plus haut, qu’on peut donner un sens géométrique à la configuration en question. Dans la Fig. 2, si l’on ne considère que les points BCD…6BCD…6

- Figure 2. : Réalisation géométrique de la configuration
(43  62)
62)

La figure 2 est le schéma d’un objet géométrique, et même d’un objet euclidien, si l’on entend par là que les « droites » sont représentées par des droites conformes à celles qu’Euclide considérait et non pas par des arcs de cercles comme dans la Fig. 1. Remarquons toutefois que l’objet est euclidien en un sens très particulier, puisque dans la configuration, beaucoup d’éléments considérés ordinairement comme faisant partie de la figure doivent être ignorés. Ainsi, les droites …623…D73)
Il n’est pas possible de réaliser une telle configuration en prenant, pour éléments de

- Figure 3. : Le « plan de Fano »
73

Une des questions qui traverse l’histoire de la théorie des configurations est celle de distinguer les configurations du genre de
Il se présente également un autre problème, plus délicat à décrire. Revenons, pour l’introduire, à la notion de structure d’incidence, dont nous avons vu qu’elle était complètement spécifiée par une table d’incidence. Si nous intervertissons la ligne
Il ne faudrait cependant pas croire que les configurations de genre bk)bk)

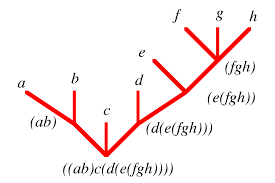
93(a)93(b)93(c)
Figure 4. : Les trois configurations93 . La seconde est la configuration de Pappus.
Il n’existe aucune possibilité de faire correspondre les lignes et les colonnes de la table d’incidence de
2- Le concept de configuration : de Reye à Moore [8]
C’est, en 1876, dans la seconde édition de son Geometrie der Lage que Theodor Reye, mathématicien allemand de l’université de Strasbourg, présente une première définition générale du terme de configuration [9] :
Une configuration
La définition est restrictive, dans la mesure où c’est seulement les configurations planaires « symétriques » (où points et droites jouent des rôles qui se font miroir) qui sont retenues. Mais surtout, Reye considère les configurations comme des objets géométriques. Une configuration d’un type donné n’est pas ici une (ou plus précisément un ensemble de) structure(s) d’incidence « abstraite », définie par une (une famille de) table(s) d’incidence : les points et les droites dont il est question dans les configurations sont pour Reye des points et des droites d’un plan —pour être précis, disons que les plans en question sont ordinaires à ceci près que deux droites quelconques s’y rencontrent toujours (on appelle de tels plans « projectifs »). Le géomètre affirme ainsi qu’il n’y a pas de configuration
Le problème des configurations est celui d’énumérer combien de configurations différentes il y a du genre
Reye, se référant aux résultats obtenus par Seligmann Kantor (un mathématicien allemand travaillant à Prague) en 1881 [11], affirme ainsi qu’il y a trois configurations

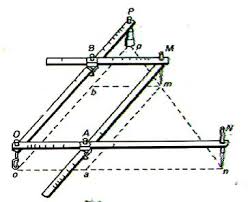
- Figure 5. : La configuration de Desargues, une des configurations
103 .

Six ans après, en 1887, un mathématicien italien, Vittorio Martinetti [12], découvre une méthode permettant de trouver le nombre de configurations symétriques

- Figure 6. : La (fausse) configuration
103 de Kantor (tiré de Gropp 2004, 82).

Comme l’on voit, il n’est pas du tout évident de déterminer en quoi la figure est incorrecte.
Schröter tire la conclusion qui s’impose en distinguant les configurations géométriquement constructibles des configurations « combinatoirement » admissibles. À la fin de son article, il reprend l’approche abstraite de Martinetti, et ajoute :
On habille ce pur problème combinatoire, consistant à construire une configuration
De la présentation qui précède, il ressort donc que la notion de configuration a d’abord été perçue comme un concept relevant de la géométrie (projective réelle) pour peu à peu s’abstraire en devenant un concept relevant de la « combinatoire ». Alors que chez Reye et Kantor, une configuration est un système d’éléments spatiaux dont on étudie les propriétés, chez Schröter, ce système est seulement « l’habit géométrique » d’une structure plus profonde, qui devrait pouvoir être décrite indépendamment de toutes considérations relatives à l’espace.
Mais Schröter ne donne aucune définition générale du concept abstrait de configuration, et on ne trouve pas chez lui la notion de structure d’incidence, telle que nous l’avons rencontrée dans la section 1. C’est le mathématicien américain E. H. Moore, dans un article intitulé Tactical Memoranda, daté de 1896, qui donne la première définition générale, sous-jacente dans le raisonnement de Schröter [14]. Moore se place dans le cadre très général d’un espace de dimension
Moore définit d’abord le concept de structure d’incidence (p. 265) et celui, connexe, de table d’incidence. Il précise que la table fournit la caractérisation complète de la relation d’incidence, « qui n’est pas autrement définie ». Il poursuit,
Ce système est appelé configuration tactique de rang h(g≠h)h=12…n
Une configuration « tactique » de rang
Pour bien comprendre comment Moore la généralise, prenons l’exemple de la configuration tridimensionnelle tétraèdre, qui peut se noter en utilisant une table de trois par trois ainsi 
 4 3 3 2 6 2 3 3 4
4 3 3 2 6 2 3 3 4 


- Figure 7. Configuration tétraèdre

Adoptant le point de vue « abstrait » de Schröter, Moore reprend ainsi la distinction entre configurations géométriquement réalisables et celles qui ne le sont pas. Le mathématicien souligne par exemple (p. 266) que
3- L’émergence des espaces finis
L’approche de Moore est « abstraite », donc en un sens déjà « moderne » si l’on entend par ce terme l’idée introduite au tout début de l’article : la configuration comme objet géométrique apparaît en effet seulement comme une interprétation de la structure combinatoire sous-jacente. J’aimerais montrer pourtant que cette « abstraction » n’est pas de même nature que celle introduite par Hilbert et sa méthode axiomatique.
En 1906, Veblen et Bussey, qui ont été élèves de Moore, publient un article fondateur, « Finite Projective Geometries », dans lequel sont élaborées, en suivant le modèle axiomatique hilbertien, les premières géométries finies (c’est-à-dire les premières géométries dans lesquelles le nombre de points et de droites et éventuellement de plans de l’espace considéré est fini). L’article de Moore y joue un rôle crucial mais ambigu. Dans la section 1 de leur article, intitulée « définition synthétique », les deux auteurs présentent une liste de cinq axiomes définissant un espace de dimension
- I L’ensemble contient un nombre fini
( de points. Il contient des sous-ensembles appelés droites, qui comportent chacun au moins trois points. 2)
2) - II Si
A etB sont des points distincts, il y a une et une seule droite qui contienneA etB . - III Si
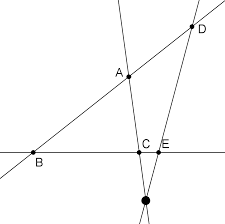
A sont trois points n’appartenant pas tous à la même droite, et si une droiteBCI contient un pointD de la droiteAB et un pointE de la droiteBC , mais ne contient niA , niB , niC , alors la droiteI contient un pointF de la droiteCA . - IV Les points ne sont pas tous sur la même droite.
Soit donc un ensemble fini de « points » (le « plan ») et une famille de sous-ensembles (les « droites » du « plan »). L’axiome I stipule que les « droites » doivent contenir au moins trois « points », l’axiome II, que deux « points » déterminent une « droite », l’axiome IV que, quelle que soit la « droite » que l’on considère, il y a un « point » extérieur à cette « droite ». Enfin l’axiome III, légèrement plus compliqué, impose que si B

- Figure 8. L’axiome III de Veblen

Si les axiomes I, II et IV sont vérifiés dans le plan euclidien, le troisième ne l’est pas puisqu’il n’est pas compatible avec l’existence d’une droite parallèle à
Ces quatre postulats correspondent presque exactement aux axiomes qui permettent à Veblen et Young, dans leur manuel de géométrie projective de 1910 [16], de développer la totalité de la géométrie du plan projectif « ordinaire » (non fini). C’est sur cette base que Veblen et Bussey peuvent affirmer que leur théorie est une géométrie projective finie : mise à part la demande que le plan soit constitué d’un nombre fini de points, rien ne distingue leur théorie de la géométrie projective standard. Cette ressemblance justifie donc de considérer leur axiomatique comme une « géométrie ».
Bussey et Veblen montrent que la configuration
Vu de plus près toutefois, leur travail prend un autre visage. Citons l’introduction de « Finite Projective Geometries » :
Par le biais du concept généralisé de géométrie tel qu’il ressort inévitablement des recherches récentes et profondes sur les fondements de cette science, est donnée, dans le §1 de cet article, une définition d’une classe de configurations tactiques qui inclut de nombreuses configurations bien connues, ainsi que plusieurs nouvelles. Le §2 développe une méthode qui permet de construire ces configurations et qui se révèle fournir toutes les configurations satisfaisant la définition. Dans les §§4-8, on montre que les configurations ont une théorie géométrique identique, dans la plupart de ses théorèmes généraux, à la géométrie projective ordinaire (…). Dans le §9, référence est faite aux autres définitions de certaines des configurations incluses dans la classe définie dans le § 1.
Veblen et Bussey se placent non seulement dans la filiation de « recherches récentes et profondes sur les fondements » de Hilbert, mais aussi dans celle des études sur les configurations développées durant toute la fin du XIXe siècle et dont le Tactical Memoranda de Moore propose une synthèse. La liste de postulats est présentée ici, non pas comme un système axiomatique particulier, mais comme la « définition d’une classe de configurations ». Et le paragraphe 9, final, dans lequel les auteurs renvoient à Moore, vise à expliciter les liens entre le concept d’espace projectif fini et les diverses structures combinatoires déjà connues –signalons, dans un langage un peu plus technique, la connexion la plus évidente : un plan projectif d’ordre [17]
L’adoption du nouveau schéma hilbertien, loin donc de constituer une rupture radicale par rapport aux anciennes recherches, permet donc de reformuler les questions liées aux configurations dans un nouveau cadre, explicitement considéré comme « géométrique ». Mais la question se pose alors de comprendre en quel sens exactement on entend désormais ce qualificatif de « géométrique ».
Caractériser les recherches de Veblen et Bussey de « géométriques » ne signifie pas, bien entendu, qu’on les assimile à celles, pré-combinatoires, de Reye et Kantor. Les espaces projectifs ne sont pas des figures, comme les configurations l’étaient chez les deux précurseurs. Veblen et Bussey adoptent le point de vue « abstrait » de Moore : les configurations ne sont pour eux que des familles de structures d’incidence. Leur idée est cependant qu’il est possible d’appliquer à l’étude de ces systèmes d’éléments abstraits, des concepts et des méthodes issus de la géométrie. Plus précisément, ils conçoivent ces systèmes comme des modèles de la théorie projective finie.
Cette réintroduction de la géométrie dans la combinatoire se manifeste de façon particulièrement spectaculaire dans le traitement par Veblen et Bussey de la configuration
Il y a ici une inversion extrêmement frappante :
Bien entendu, c’est « le concept généralisé de géométrie, tel qu’il ressort inévitablement des recherches récentes et profondes sur les fondements de cette science », c’est-à-dire les Fondements de Hilbert, qui explique ce renversement (la configuration
D’une certaine façon, même lorsqu’une configuration est conçue comme un objet géométriquement réalisable, elle possède déjà une certaine indépendance, une certaine autonomie, par rapport à son plan d’inscription. Nous avions noté que la Fig. 2, celle de la configuration de quatre points et de six droites, pouvait difficilement être considérée comme une figure euclidienne, dans la mesure où, chez elle, certains éléments qui d’ordinaire seraient considérés comme faisant partie du schéma devaient en être exclus. Toujours dans le même ordre d’idées, j’ai choisi, dans la Fig. 1, de représenter la droite
Les configurations n’ont aucun hors-champ que l’on pourrait utiliser à discrétion pour introduire ce qui nous est nécessaire dans les démonstrations. Les relations d’incidence entre les points et les droites y sont fixées dès le début, et toute modification de ces relations détruit le système que l’on considère. Le regard qui parcourt une configuration géométrique n’est ainsi pas le même que celui qui étudie une figure euclidienne. L’attention est focalisée sur le nombre d’intersections – elle n’est pas tendue par la possibilité d’enrichir ou de diviser la figure.
Veblen et Bussey, en construisant leurs nouvelles géométries, ne font donc qu’accomplir ce mouvement d’autonomisation contenu en germe dans la notion de configuration. La tendance à détacher la figure de son inscription dans un espace atteint son apogée dans le concept de plan projectif fini : le plan de Fano n’est pas le dessin d’une figure sur une feuille – il est censé se substituer à la feuille sur laquelle on dessine.
Conclusion
Que Veblen et Bussey s’inscrivent dans le projet de refondre axiomatiquement la géométrie n’empêche pas leur travail de prolonger et radicaliser les premières recherches sur les configurations. L’étude des géométries finies est ainsi un bon belvédère pour observer et tenter de mesurer in concreto l’impact des Fondements de la géometrie sur la pratique des géomètres.
Veblen, comme Moore d’ailleurs [18], ont lu Hilbert très précisément, et, avec d’autres mathématiciens américains (les travaux de ce groupe sont connus étant ceux de l’« école postulationniste » [19] ), ils entreprennent d’appliquer la nouvelle méthode à des champs très différents (théorie algébriques, géométriques, etc).
Dans l’article sur la géométrie finie de 1906, l’utilisation du modèle hilbertien rencontre toutefois un mouvement d’abstraction déjà fort abouti – celui qui a mené les mathématiciens des configurations considérées comme des objets géométriques aux configurations combinatoires abstraites. Dans ce contexte, l’axiomatisation n’est pas seulement une étape supplémentaire vers l’abstraction – ironiquement, elle se présente même comme un mouvement inverse, comme un retour vers la géométrie.
La nouvelle approche permet en effet d’appliquer les concepts et les techniques géométriques à des situations et des problèmes purement combinatoires. Essayer de préciser l’impact des Fondements sur les mathématiciens américains travaillant sur les configurations permet donc de mesurer combien la révolution copernicienne que représente l’approche hilbertienne intègre des éléments qui appartiennent à un socle plus ancien.
Plus généralement, l’opposition souvent reprise entre géométrie de la figure et géométrie de l’espace a l’inconvénient de présupposer que le mode d’insertion de la figure dans un espace n’est pas vraiment un problème digne de l’attention de l’historien. Dans la perspective de la dichotomie entre espace et figure, soit on se concentre sur la figure, et dans ce cas, la question de la nature de l’espace dans lequel « vit » la figure ne peut par principe pas être explicitée ; soit on axiomatise l’espace sous-jacent, mais alors l’étude des triangles et des cercles, des courbes et des droites, devient secondaire et disparaît de l’horizon.
Or, il semble que le rapport entre la figure à son « environnement » (à son « support », et même à la matérialité de ce support) ait parfois été une question pour les mathématiciens (qu’ils précèdent Hilbert ou qu’ils le suivent). Elle devrait donc l’être aussi pour les historiens des mathématiques. La feuille sur laquelle le géomètre trace ses figures a des bords – n’est-il pas possible prendre en compte l’existence de ces limites dans la pratique géométrique elle-même [20] ?
Certaines sortes de « figures » (mais faut-il encore les appeler ainsi ?), les configurations, dans lesquelles les rapports à l’espace « environnant » sont comme suspendus, ont peu à peu été prises pour sujet d’étude par les géomètres au XIXème siècle – comment caractériser ces nouveaux objets ?
Enfin, les mathématiciens qui travaillent de nos jours en géométrie discrète et plus généralement en combinatoire utilisent abondamment des figures et même des stéréogrammes [21] pour représenter les espaces qu’ils considèrent – quel statut accorder à ces figures-espaces ? Ce qui précède doit être lu comme une invitation à poser ce genre de questions [22]
Notes
[1] Hilbert D., Les fondements de la géométrie (1899), trad. fr. P. Rossier, Gabay, 2000.
[2] Le premier axiome stipule que deux points déterminent une droite, le second que l’on peut prolonger continûment en ligne droite une droite limitée donnée, le troisième que l’on peut construire un cercle lorsque l’on dispose de son rayon et son centre, le quatrième que tous les angles droits sont égaux entre eux. Le cinquième axiome a toujours eu un statut particulier : il s’agit de l’axiome des parallèles, qui revient à demander que, par un point extérieur à une droite donnée, il ne passe qu’une et qu’une seule parallèle à cette droite.
[3] Il en va notamment ainsi des propositions qui mettent en jeu des considérations tenant à la continuité, au déplacement ou encore à l’« ordre » (c’est-à-dire à ce qui est relatif, par exemple, à la distinction entre intérieur et extérieur d’une courbe close, ou à l’opposition entre demi-plan droit et gauche, etc.).
[4] La formulation des axiomes varie selon les éditions. Mais la division en cinq groupes reste constante : les 7 axiomes « d’appartenance » posent des conditions sur les relations d’incidence entre points, droites et plans ; les 5 axiomes d’ordre donnent un sens à l’expression « être entre deux points » et à la notion de demi-plan ; l’axiome des parallèles reprend le contenu du postulat d’Euclide ; les 5 postulats de congruence définissent l’égalité entre les segments et entre les aires ; enfin Hilbert ajoute deux axiomes de continuité.
[5] Par souci de symétrie, on parle de « droite » sur un point comme on parlait de « point » sur une droite.
[6] Les nombres qui figurent dans la diagonale (qui va de gauche à droite en descendant) correspondent aux nombres de « points » et de « droites » de la configuration (4 « points » et 6 « droites ») ; les autres nombres indiquent le nombre de « points » situés sur chaque « droite » (2) et le nombre de « droites » rencontrant chaque « point » (3).
[7] E. Steinitz, Über die Construction der Configurationen
[8] Dans toute cette section, je reprends les conclusions de l’article très éclairant de H. Gropp, « Configurations between geometry and combinatorics », Discrete Applied Mathematics, (2004), 138, pp. 79-88, auquel je renvoie le lecteur pour plus de précisions.
[9] Th. Reye, Geometrie der Lage, (1867), C. Jümpler, Hannover, 2nd edition, 1876. La notion de configuration est historiquement liée au développement de la géométrie projective au XIXe siècle. Cela n’est pas surprenant, dans la mesure où la géométrie projective est progressivement devenue une théorie portant sur les relations d’intersection et d’appartenance (c’est-à-dire les relations d’incidence) entre les points, les droites et les plans dans l’espace. Mais ce n’est que relativement tardivement que, dans le contexte de ses recherches sur la théorie projective, Theodor Reye introduit cette première définition générale de la configuration.
[10] Th. Reye, “Das Problem der Configurationen”, (1882), Acta Mathematica, 1, pp. 93–96.
[11] S. Kantor, “Die Configurationen
[12] V. Martinetti, “Sulle le configurazione piani  33
33
[13] H. Schröter, “Ueber die Bildungsweise und geometrische Construction der Configurationen”, (1889), Göttinger Nachrichten, pp.193–236. Pour de plus amples détails, voir Gropp 2004, 83-85.
[14] « Tactical Memoranda », American Journal of Mathematics, (1896), 18, pp.264-303. Moore explique que « sous le titre général de Tactical Memoranda », il « publiera une série d’articles concernant des sujets plus ou moins liés entre eux de Tactique ». Pour une définition de « tactique », Moore renvoie à Cayley (« On the Notion of Boundaries of Algebra », Quarterly Journal of Mathematics, 6, 1864, Collected Math. Papers, V). Un problème tactique est pour Cayley un problème de combinatoire.
[15] L’exemple est tiré de O. Veblen & J. W. Young, Projective Geometry, I, 1910, New York : Ginn and Company, pp. 38-40.
[16] Voir O., Veblen & J. W. Young, Projective Geometry, op. cit.… , pp.15-19.
[17] Lorsque sa dimension est supérieure ou égale à 3, un espace projectif peut toujours être défini à partir d’un espace vectoriel (le cas
[18] E. H. Moore, “On the foundations of mathematics”, Bulletin of the American Mathematical Society, (1903), 9, pp. 402-424.
[19] M. J. Scanlan, “Who were the American postulate theorists”, Journal of Symbolic Logic, (1991), 56, pp. 981-1002.
[20] J’ai discuté cette question dans « Pasch entre Klein et Peano : empirisme et idéalité en géométrie », Dialogue, (2005), 14, pp. 653-692.
[21] B. Polster, A Geometrical Picture Book, Springer, 1998
[22] Je remercie chaleureusement Karine Chemla pour l’aide qu’elle m’a apportée dans la construction de cet article.
Source : http://images.math.cnrs.fr/Entre-figures-et-espaces-le-ca...
20:00 Publié dans Entre figures et espaces : le cas des diagrammes | Lien permanent | Commentaires (0) | Tags : entre figures et espaces : le cas des diagrammes en géométrie fi |  |
|  del.icio.us |
del.icio.us |  |
|  Digg |
Digg |  Facebook
Facebook
Les commentaires sont fermés.